












7. Prüfverfahren
7.1 Testbedingungen
7.1.1 Umweltbedingungen
7.1.1.1 Atmosphärische Referenzbedingungen
Die Referenzleistung des Stellantriebs sollte unter den folgenden atmosphärischen Bedingungen geprüft werden:
Umgebungstemperatur: 20°C ± 2°C;
Relative Luftfeuchtigkeit: 60% bis 70%;
Atmosphärischer Druck: 86 kPa bis 106 kPa.
7.1.1.2 Allgemeine atmosphärische Bedingungen
Wenn die Prüfungen nicht unter atmosphärischen Referenzbedingungen durchgeführt werden, empfiehlt es sich, die Prüfungen unter den folgenden atmosphärischen Bedingungen durchzuführen:
Umgebungstemperatur: 15°C bis 35°C;
Relative Luftfeuchtigkeit: 45% bis 75%;
Atmosphärischer Druck: 86 kPa bis 106 kPa.
7.1.1.3 Andere Umweltbedingungen
Mit Ausnahme des Erdmagnetfeldes sollten andere externe Magnetfelder und mechanische Vibrationen vernachlässigbar sein.
7.1.2 Leistungsbedingungen
7.1.2.1 Nennwerte
Wie in 4.2.2 beschrieben.
7.1.2.2 Toleranzen
Die Toleranzen für die Prüfbedingungen sind wie folgt:
Nennspannung: ±1%;
Nennfrequenz: ±1%;
Oberwellengehalt: weniger als 5%.
7.2 Allgemeine Prüfvorschriften
7.2.1 Das geprüfte Produkt sollte sich in seiner normalen Einbaulage befinden. Die Stromversorgung kann angeschlossen und 1 Stunde lang vorgeheizt werden, damit sich die Innentemperatur des geprüften Produkts stabilisieren kann.
7.2.2 Die Nullstellung des geprüften Produkts kann vor der Prüfung eingestellt werden. Sofern nicht anders angegeben, sollte während der Prüfung keine Einstellung vorgenommen werden.
7.2.3 Sofern nicht anders angegeben, sollten das geprüfte Produkt und die zugehörige Prüfausrüstung vor der Messung unter Referenzarbeitsbedingungen stabilisiert werden, und alle Arbeitsbedingungen, die die Messergebnisse beeinflussen können, sollten beobachtet und aufgezeichnet werden.
7.2.4 Die Genauigkeit der bei den Prüfungen verwendeten Standardinstrumente sollte im Prüfbericht angegeben werden, und die Grundfehlergrenze sollte weniger als oder gleich einem Drittel der Grundfehlergrenze des geprüften Produkts betragen. Der Messbereich des Geräts sollte mit dem Bereich der gemessenen Werte übereinstimmen.
7.2.5 Während der Prüfung sollte das Stromeingangssignal langsam erhöht oder verringert werden, wobei die Prüfpunkte in der gleichen Richtung anzufahren sind, um ein Überschwingen zu vermeiden. Das ansteigende Signal sollte als positiver Hub und das abfallende Signal als umgekehrter Hub betrachtet werden.
7.2.6 Sofern nicht anders angegeben, sollte die Abtriebswelle (Stange) des Stellantriebs während der Prüfung mit der Nennlast belastet werden. Die Last gilt als positiv, wenn ihre Wirkungsrichtung mit der Bewegungsrichtung der Abtriebswelle (Stange) übereinstimmt; andernfalls gilt sie als negativ.
7.2.7 Wenn nicht anders angegeben, sollten die Testmesspunkte bei 0%, 25%, 50%, 75% und 100% des Eingangsbereichs liegen. Jeder Testpunkt sollte dreimal sowohl in der Richtung des ansteigenden als auch des abfallenden Signals gemessen werden. Bei der Werksprüfung wird jeder Prüfpunkt einmal gemessen.
7.2.8 Wenn nicht anders angegeben, sollten sich die Einflussfaktoren für die Prüfung nur innerhalb der angegebenen Arbeitsbedingungen ändern. Alle anderen Arbeitsbedingungen sollten unter Referenzbedingungen konstant bleiben.
7.2.9 Wenn es aufgrund der Bedingungen nicht möglich ist, Einflussfaktortests unter atmosphärischen Referenzbedingungen durchzuführen, kann der Test unter allgemeinen atmosphärischen Bedingungen durchgeführt werden.
7.2.10 Sofern nicht anders angegeben, gilt für die Prüfung der folgende Nennhubbereich:
Multi-Turn: 10 Umdrehungen;
Winkelhub: 90°;
Linearer Hub: 16 mm.
7.3 Grundlegender Fehler
Der Grundfehler wird durch langsames Erhöhen oder Verringern des Eingangssignals berechnet, wobei die Eingangssignalwerte und die Hubwerte der Abtriebswelle (Stange) sowohl in positiver als auch in umgekehrter Hubrichtung gemäß Formel (1) aufgezeichnet werden.

Formel (1)
Wo:
δ: Grundfehler, %;
L1: Hubwert der Abtriebswelle (Stange), in Grad (°), Millimeter (mm) oder Umdrehungen (r);
Lo: Theoretischer Hubwert der Abtriebswelle (Stange), in Grad (°), Millimeter (mm) oder Umdrehungen (r);
L: Nennhubbereich der Abtriebswelle (Stange), in Grad (°), Millimetern (mm) oder Umdrehungen (r).
Prüfen Sie, ob der Grundfehler an jedem Messpunkt den in 6.1.1 angegebenen Grenzwert überschreitet.
7.4 Positionsausgangssignal Grundabweichung
Das Stellungsausgangssignal wird an eine 250-Ω-Lastimpedanz angeschlossen, und der Stellantrieb wird in die Position "vollständig geschlossen" gefahren. Stellen Sie das Stellungsausgangssignal auf 4 mA ein; fahren Sie den Stellantrieb in die Stellung "vollständig geöffnet", und stellen Sie das Stellungsausgangssignal auf 20 mA ein. Fahren Sie dann den Stellantrieb und zeichnen Sie die Werte des Stellungsausgangssignals an jedem Punkt sowohl in der positiven als auch in der umgekehrten Hubrichtung auf. Die Basisabweichung wird nach der Formel (2) berechnet.

Formel (2)
Wo:
△0: Grundabweichung des Stellungsausgangssignals, %;
Io: Theoretischer Wert des Positionsausgangssignals, in Milliampere (mA);
I1: Messwert des Positionsausgangssignals, in Milliampere (mA);
I: Bereich des Positionsausgangssignals, in Milliampere (mA). (Für 4 mA bis 20 mA, I = 16 mA; für 0 mA bis 20 mA, I = 20 mA).
Prüfen Sie, ob die Basisabweichung an jedem Messpunkt den in 6.1.2 angegebenen Grenzwert überschreitet.
7.5 Hysterese
Die Hysterese des Stellantriebs wird durch die maximale algebraische Differenz zwischen den an jedem Prüfpunkt gemessenen Grundfehlern des Vorwärts- und Rückwärtshubs bestimmt, wie in 7.3 und 7.4 festgelegt.
7.6 Tote Zone
Bei Regelantrieben sollte die Totzone bei 25%, 50% und 75% des Nennhubs gemessen werden. Die Messschritte sind wie folgt:
Erhöhen (bzw. verringern) Sie das Eingangssignal langsam, bis eine spürbare Hubänderung an der Abtriebswelle (Stange) auftritt, und zeichnen Sie den Eingangssignalwert an diesem Punkt I (mA) auf;
Dann wird das Eingangssignal in entgegengesetzter Richtung langsam verringert (bzw. erhöht), bis eine spürbare Hubänderung an der Abtriebswelle (Stange) auftritt, und der Eingangssignalwert I² (mA) aufgezeichnet.
Die tote Zone wird nach der Formel (3) berechnet.

Formel (3)
Wo:
△: Tote Zone, %.
7.7 Zeitverzögerung
Legen Sie ein Sprungsignal von 15% des Eingangsbereichs an die Eingangssignalklemme des Stellantriebs an, zeichnen Sie mit einem Oszilloskop die Kurve des Eingangssignals und die Kurve des Positionsausgangssignals auf und beobachten Sie die Zeitdifferenz zwischen dem anfänglichen Eingangssignal und dem Beginn der Änderung des Ausgangssignals, um festzustellen, ob sie den in 6.1.5 angegebenen Grenzwert überschreitet.
7.8 Nennhubzeitfehler
Legen Sie 45% bis 55% der Nennlast am Stellantrieb an, legen Sie ein Schrittsignal an, das ausreicht, um die Abtriebswelle (Stange) des Stellantriebs über den Nennhub zu bewegen, und zeichnen Sie die Zeit auf, die die Abtriebswelle (Stange) benötigt, um den Nennhub zu erreichen. Der Nennhubzeitfehler wird nach Formel (4) berechnet.

Formel (4)
Wo:
δt: Nennhubzeitfehler, %;
t1: Gemessene Zeit für die Bewegung der Abtriebswelle (Stange) um den Nennhub, in Sekunden (s);
t: Theoretische Nennhubzeit, in Sekunden (s).
7.9 Startmerkmale
Bringen Sie eine umgekehrte Nennlast an der Abtriebswelle (Stange) des Stellantriebs an und ändern Sie die Versorgungsspannung auf den unteren Grenzwert. Legen Sie dann das Eingangssignal an und beobachten Sie, ob der Stellantrieb normal anlaufen kann.
7.10 Wiederholbarkeitsfehler des Hubkontrollmechanismus
Bei Stellantrieben mit Hubkontrollmechanismus die Abtriebswelle (Stange) mit 25% bis 30% der Nennlast belasten und den Stellantrieb fünfmal abwechselnd im Vorwärts- und Rückwärtshub betreiben. Beobachten und notieren Sie die Hubwerte der Abtriebswelle (Stange), wenn der Hubkontrollmechanismus schaltet. Berechnen Sie den Fehler jedes aufgezeichneten Wertes im Vergleich zum Basiswert und stellen Sie fest, ob der Fehler den in 6.1.8 angegebenen Grenzwert überschreitet.
7.11 Isolationswiderstand
Trennen Sie unter allgemeinen atmosphärischen Bedingungen und bei unbelastetem Antrieb die Stromversorgung des geprüften Produkts und lassen Sie den Netzschalter in der Position "Ein". Schließen Sie die Eingangs- und Leistungsklemmen kurz und messen Sie dann mit einem 500-V-Gleichstrom-Isolationswiderstandsprüfer den Isolationswiderstand zwischen den Klemmen wie in 6.1.9 angegeben.
7.12 Isolationsstärke
Unter allgemeinen atmosphärischen Bedingungen und bei unbelastetem Antrieb die Stromversorgung unterbrechen und den Netzschalter in der Stellung "ein" halten. Schließen Sie die Eingangs- und Leistungsklemmen kurz und erhöhen Sie dann entsprechend der in 6.1.10 angegebenen Spannung und Frequenz langsam die Prüfspannung von Null auf den angegebenen Wert und halten Sie sie für 1 Minute. Beobachten Sie, ob es zu Durchschlägen oder Lichtbögen kommt, senken Sie dann die Prüfspannung langsam auf Null und schalten Sie die Prüfspannung ab.
7.13 Temperaturanstieg
Vor der Prüfung den Kaltwiderstand der Motor- und Transformatorwicklungen mit einer Brücke messen, dann 12 Stunden lang kontinuierlich gemäß 7.14 laufen lassen und sofort den Warmwiderstand der Motor- und Transformatorwicklungen messen. Berechnen Sie den Temperaturanstieg nach Formel (5).

Formel (5)
Wo:
Q: Temperaturanstieg, in Celsius (°C);
R₂: Warmwiderstand der Wicklung, in Ohm (Ω);
R₁: Kaltwiderstand der Wicklung, in Ohm (Ω);
T1: Raumtemperatur während der Messung des Kaltwiderstands, in Celsius (°C);
T₂: Raumtemperatur während der Hitzebeständigkeit
7.14 Langfristige Betriebsstabilität
Betreiben Sie den Antrieb innerhalb seines Nennhubes und bringen Sie 30% der Nennlast auf, mit einem Arbeitszyklus von 20% bis 80%. Führen Sie einen 48-stündigen Betrieb gemäß 4.2.6 durch, wobei die Anzahl der Zyklen pro Stunde anzugeben ist. Nach der Prüfung ist zu überprüfen, ob der Antrieb die Anforderungen von 6.1.12 erfüllt.
7.15 Maximales und minimales Steuerdrehmoment und Schubkraft Reproduzierbarkeitsfehler
Prüfverfahren wie folgt: a) Den Stellantrieb auf dem Prüfstand montieren, den Drehmomentschutzwert sowohl in Öffnungs- als auch in Schließrichtung auf das maximale Steuerdrehmoment oder den maximalen Schubwert einstellen und den Stellantrieb allmählich belasten, bis ein Alarm "Drehmomentüberlastung" oder "Schubüberlastung" ausgelöst wird. Messen Sie das Ausgangsdrehmoment oder den Schubkraftwert. Messen Sie dreimal in jeder Richtung und nehmen Sie den Durchschnittswert als Basiswert des Ausgangsdrehmoments oder der Schubkraft. b) Installieren Sie den Stellantrieb auf dem Prüfstand, stellen Sie den Drehmomentschutzwert in Öffnungs- und Schließrichtung auf den minimalen Steuerdrehmoment- oder Schubkraftwert ein und belasten Sie den Stellantrieb allmählich, bis ein "Drehmomentüberlastungs"- oder "Schubkraftüberlastungs"-Alarm ausgelöst wird. Messen Sie das Ausgangsdrehmoment oder den Schubkraftwert. Messen Sie dreimal in jeder Richtung und nehmen Sie den Durchschnittswert als Basiswert des Ausgangsdrehmoments oder der Schubkraft. c) Berechnen Sie den Reproduzierbarkeitsfehler des Steuerdrehmoments oder der Schubkraft nach Formel (6).

Formel 6:
In dieser Formel:
δ0: Reproduzierbarkeitsfehler des Steuerdrehmoments oder -schubs, in %
Ms: Gemessenes Abtriebsdrehmoment oder Schubkraftwert in N-m (oder Schubkraft in N)
Mz: Basiswert des Ausgangsdrehmoments oder der Schubkraft in N-m (oder Schubkraft in N).
7.16 Mechanismus des manuell-elektrischen Schalters
Prüfverfahren wie folgt: a) Prüfung des Leerlaufschalters. Schalten Sie den Stellantrieb vom elektrischen auf den manuellen Betrieb um, drehen Sie das Handrad, um die Abtriebswelle im und gegen den Uhrzeigersinn für mindestens eine volle Umdrehung zu drehen; betätigen Sie dann den Stellantrieb elektrisch, um die Abtriebswelle in beide Richtungen für mindestens eine volle Umdrehung zu drehen. Wiederholen Sie den Vorgang zweimal und prüfen Sie, ob er die Anforderungen von 6.1.14 erfüllt. b) Prüfung des belasteten Schalters. Installieren Sie den Stellantrieb auf dem Prüfstand, stellen Sie das Schutzdrehmoment in Öffnungs- und Schließrichtung auf das maximale Steuerdrehmoment ein und belasten Sie den Stellantrieb allmählich, bis der Drehmomentschalter aktiviert wird. Nach dem Anhalten, ohne Entlastung, ist die Prüfung gemäß Teil a) zu wiederholen, um zu bestätigen, dass die Anforderungen von 6.1.14 erfüllt sind.
7.17 Intelligente Funktionen
7.17.1 Anzeigefunktion
Prüfen Sie, ob die Arbeitsparameter, die Informationen zum Betriebszustand, die Fehlermeldungen und andere Anzeigeinformationen normal sind und ob der Inhalt der Anzeige über die Mensch-Maschine-Schnittstelle vollständig und klar ist.
7.17.2 Funktion der Parametereinstellung
Prüfen Sie, ohne die elektrische Abdeckung zu öffnen, ob die Mensch-Maschine-Schnittstelle die Einstellung von Parametern wie Hub, Drehmoment, Kalibrierung des Stromeingangssignals und Einstellung des Ausgangssignals ermöglicht.
7.17.3 Vor-Ort-Konfigurationsfunktion
Ohne die elektrische Abdeckung zu öffnen, verwenden Sie die Mensch-Maschine-Schnittstelle, um die 4-Wege-Schaltkontaktausgänge des Stellantriebs wie folgt einzustellen: Offen-Stellung geschlossen, Offen-Stellung offen, Geschlossen-Stellung geschlossen, Geschlossen-Stellung offen. Starten Sie den Stellantrieb in den Positionen "offen" und "geschlossen" und prüfen Sie, ob die Schaltkontaktausgänge die eingestellten Anforderungen erfüllen.
Prüfen Sie ggf. das Verhalten nach einem Stromausfall und stellen Sie Parameter wie den Drehmomentschutz ein.
7.17.4 Fehlerselbstdiagnose und Alarmfunktion
Schalten Sie den Antrieb im Leerlauf ein und trennen Sie die Motortemperaturleitung vom Steuersystem des Antriebs, um zu prüfen, ob der Motorüberhitzungsalarm ausgelöst wird.
7.17.5 Selbstanpassende Funktion der Stromsequenz
Ändern Sie bei Antrieben, die mit Drehstrom betrieben werden, die Phasenfolge der Stromversorgung und überprüfen Sie, ob die Schaltrichtung sowohl im Orts- als auch im Fernsteuerungsmodus korrekt ist.
7.17.6 Funktion zur Messung des kontinuierlichen Ausgangsdrehmoments (Schubkraft)
Stellen Sie den Stellantrieb auf den Prüfstand und ändern Sie während des Betriebs kontinuierlich das aufgebrachte Drehmoment (die Schubkraft), um zu beobachten, ob sich die angezeigten Drehmoment- (Schubkraft-) Werte auf der Mensch-Maschine-Schnittstelle entsprechend ändern.
7.18 Lärm
Führen Sie in einem Raum mit geschlossenen Fenstern und Türen, in dem die Hintergrundgeräusche 45 dB nicht überschreiten, eine Inbetriebnahme des Stellantriebs im Leerlauf durch und messen Sie das Geräusch in einem Abstand von 1 Meter von der Oberfläche des Stellantriebs. Bestätigen Sie, dass das Geräusch den Anforderungen in 6.1.16 entspricht.
7.19 Stufenlose (Frequenzumwandlung) Drehzahlregelung
Stellen Sie den Aktuator so ein, dass er die Geschwindigkeit reduziert, wenn er die Zielposition erreicht, und prüfen Sie, ob sich die Geschwindigkeit bei verschiedenen Lastbedingungen innerhalb des angegebenen Bereichs ändert, um die Einhaltung der Vorschriften zu bestätigen.
7.20 Auswirkungen der Umgebungstemperatur
Der Stellantrieb sollte im Leerlauf in eine Temperaturprüfkammer gestellt werden. Die Prüftemperaturen und der Prüfablauf sind wie folgt:
Für Antriebe mit einer Betriebsumgebungstemperatur von -10°C bis 55°C:
20°C (Referenz), 40°C, 55°C, 20°C, 0°C, -10°C, 20°C;
Für Antriebe mit einer Betriebsumgebungstemperatur von -20°C bis 60°C:
20°C (Referenz), 40°C, 60°C, 20°C, 0°C, -20°C, 20°C;
Für Antriebe mit einer Betriebsumgebungstemperatur von -30°C bis 70°C:
20°C (Referenz), 45°C, 70°C, 20°C, 0°C, -30°C, 20°C.
Wenn alle Beteiligten zustimmen, können die Tests bei nur vier Temperaturpunkten durchgeführt werden: 20°C (Referenz), die Höchsttemperatur, die Mindesttemperatur und 20°C. Die zulässige Toleranz bei jedem Temperaturpunkt beträgt ±2°C. Bei jedem Temperaturpunkt sollte die Temperatur 2 Stunden lang gehalten werden, damit die internen Komponenten des Produkts ihre thermische Stabilität erreichen können. An den Positionen 0% und 100% des Vollhubs sollten die unteren und oberen Werte des Proportionalsteuerungs- und Positionssignalausgangs gemessen werden. Es sollte der Durchschnitt von drei Messungen bei jedem Temperaturpunkt genommen werden. Die Änderungen der unteren und oberen Grenzwerte an jedem Temperaturpunkt, wenn sich die Temperatur um 10 °C ändert, sollten mit den Formeln (7) und (8) berechnet werden, und es sollte bestätigt werden, dass die Ergebnisse die Anforderungen von Abschnitt 6.2.1 erfüllen.


Wo:
△T0: Die Änderung der unteren und oberen Werte des Positionsausgangssignals bei einer Temperaturänderung von 10°C, in %;
XTi: Der gemessene Low- und High-End-Wert des Positionsausgangssignals bei der angrenzenden Temperatur, in Milliampere (mA);
XT0: Die gemessenen unteren und oberen Werte des Positionsausgangssignals bei der Starttemperatur, in Milliampere (mA);
Ti: Die angrenzende Temperatur, in Grad Celsius (°C);
T0: Die Ausgangstemperatur in Grad Celsius (°C);
△T1: Die Änderung der unteren und oberen Werte der Abtriebswelle (Stange) bei einer Temperaturänderung von 10°C, in %;
LTi: Die gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) bei der jeweiligen Temperatur in Grad (°), Millimeter (mm) oder Umdrehungen (r);
LT0: Die gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) bei der Starttemperatur, in Grad (°), Millimeter (mm) oder Umdrehungen (r).
7.21 Auswirkungen der Luftfeuchtigkeit
Legen Sie den Stellantrieb in eine Temperatur- und Feuchtigkeitskammer, erhöhen Sie die Temperatur auf 40°C ± 2°C und stellen Sie die Luftfeuchtigkeit auf 91%-95% ein und halten Sie diese für 48 Stunden. Prüfen Sie nach dem Test den Isolationswiderstand des Stellantriebs wie angegeben.
7.22 Einfluss der Versorgungsspannung
Im Leerlauf wird die Versorgungsspannung des Stellantriebs vom Nennwert auf den oberen und unteren Grenzwert eingestellt. An den Positionen 0% und 100% des vollen Hubs werden die unteren und oberen Grenzwerte der Proportionalsteuerungs- und Positionssignalausgänge gemessen. Der Durchschnitt von drei Messungen an jedem Punkt wird genommen, und die Änderungen der unteren Grenze und des Bereichs werden mit den Formeln (9) und (10) berechnet. Die Ergebnisse sollten so überprüft werden, dass sie die Anforderungen von Abschnitt 6.2.3 erfüllen.
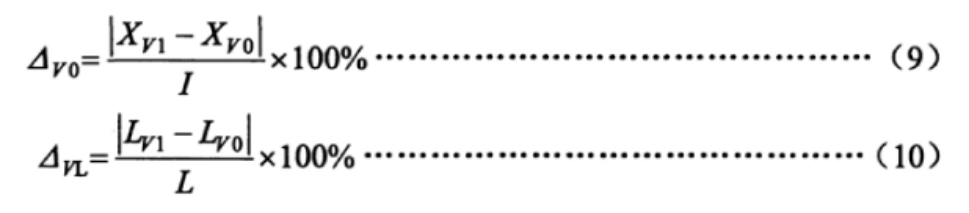
Wo:
△V0: Die Änderung der Low- und High-End-Werte des Positionsausgangssignals bei Änderung der Versorgungsspannung, in %;
XV1: Die gemessenen Low- und High-End-Werte des Positionsausgangssignals bei der oberen und unteren Grenzspannung, in Milliampere (mA);
XV0: Die gemessenen Low- und High-End-Werte des Positionsausgangssignals bei der Nennspannung, in Milliampere (mA);
△VL: Die Änderung der unteren und oberen Werte der Abtriebswelle (Stange) bei Änderung der Versorgungsspannung, in %;
LV1: Die gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) bei den oberen und unteren Grenzspannungen in Grad (°), Millimeter (mm) oder Umdrehungen (r);
LV0: Die gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) bei Nennspannung in Grad (°), Millimeter (mm) oder Umdrehungen (r).
7.23 Einfluss von mechanischen Schwingungen
Der Stellantrieb wird im Leerlauf auf einem Schwingungsprüfstand installiert. Der Aktuator wird sowohl in die Position 0% als auch in die Position 100% des vollen Hubs gefahren. Um den Resonanzpunkt zu ermitteln, werden Schwingungen mit einer Frequenz von 10 Hz bis 150 Hz in drei zueinander senkrechten Richtungen erzeugt. Wenn ein Resonanzpunkt gefunden wird, werden 30 Minuten lang Vibrationstests bei der Resonanzfrequenz durchgeführt. Wird kein Resonanzpunkt gefunden, wird ein 30-minütiger Vibrationstest mit einer Frequenz von 150 Hz durchgeführt.
Während des Tests werden die Low-End- und High-End-Werte des Aktuatorausgangs gemessen. Die Änderungen der Low-End- und High-End-Werte werden mit den Formeln (11) und (12) berechnet. Die Ergebnisse sollten so überprüft werden, dass sie die Anforderungen von Abschnitt 6.2.4 erfüllen.
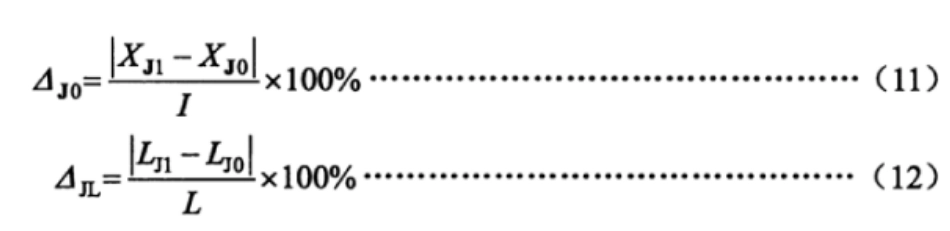
Wo:
△J0: Die Änderung der unteren und oberen Werte des Positionsausgangssignals aufgrund von mechanischen Schwingungen, in %;
XJ1: Die gemessenen niedrigen und hohen Werte des Positionsausgangssignals während des Vibrationstests, in Milliampere (mA);
XJ0: Die gemessenen unteren und oberen Werte des Positionsausgangssignals vor dem Vibrationstest, in Milliampere (mA);
△JL: Die Änderung der unteren und oberen Werte der Abtriebswelle (Stange) aufgrund von mechanischen Schwingungen, in %;
LJ1: Die während des Vibrationstests gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) in Grad (°), Millimeter (mm) oder Umdrehungen (r);
LJ0: Die gemessenen unteren und oberen Hubwerte der Abtriebswelle (Stange) vor dem Vibrationstest in Grad (°), Millimeter (mm) oder Umdrehungen (r).
7.24 Verkehr Umweltauswirkungen
Temperatur-, Schock- und Freifallprüfungen sind gemäß den in Abschnitt 6.2.5 dieser Norm festgelegten Prüfparametern und den Verfahren in GB/T 25480 durchzuführen. Nach den Prüfungen kann die Nullposition eingestellt werden, gefolgt von der Leistungsprüfung und der Sichtprüfung.
Hinweis: Wenn die Prüfung des Einflusses der Umgebungstemperatur bereits bei 55 °C (oder höher) durchgeführt wurde, kann auf die Hochtemperaturprüfung verzichtet werden.
7.25 Störfestigkeit gegen hochfrequente elektromagnetische Felder
Im unbelasteten Zustand wird der Aktuator in die Position 50% des vollen Hubs bewegt. Ein gestrahltes elektromagnetisches Feld im Frequenzbereich von 80 MHz bis 1000 MHz mit einer Intensität von 3 V/m wird in einem Abstand von 3 Metern vom Stellantrieb angelegt, in Übereinstimmung mit den Anforderungen von GB/T 17626.3. Während dieser Prüfung werden die Änderungen des Ausgangssignals der Positionsrückmeldung oder der Hubwerte der Abtriebswelle (Stange) beobachtet und aufgezeichnet, um zu bestätigen, dass die Werte die Anforderungen von Abschnitt 6.2.6 dieser Norm erfüllen.
7.26 Elektrische Störfestigkeit gegen schnelle Transienten/Bursts
Im Leerlauf wird der Antrieb in die Position 50% des vollen Hubs gefahren. Die Prüfspannung wird gemäß den Anforderungen von GB/T 17626.4 angelegt, mit positiven und negativen 1000 V an der Stromversorgungsklemme und positiven und negativen 500 V an der Signaleingangsklemme. Während dieser Prüfung werden die Änderungen des Ausgangssignals der Positionsrückmeldung oder der Hubwerte der Abtriebswelle (Stange) beobachtet und aufgezeichnet, um zu bestätigen, dass die Werte die Anforderungen von Abschnitt 6.2.7 dieser Norm erfüllen.
7.27 Störfestigkeit gegen Überspannungen (Impulse)
Im Leerlauf wird der Aktuator in die Position 50% des vollen Hubs gefahren. Zwischen der Stromversorgungsleitung des Stellantriebs und der Erde wird gemäß GB/T 17626.5 eine positive und negative Spannung von 1 kV angelegt. Während dieser Prüfung werden die Änderungen des Ausgangssignals der Positionsrückmeldung oder der Hubwerte der Abtriebswelle (Stange) beobachtet und aufgezeichnet, um zu bestätigen, dass die Werte die Anforderungen von Abschnitt 6.2.8 dieser Norm erfüllen.
7.28 Störfestigkeit gegen elektrostatische Entladungen
Im Leerlauf wird der Antrieb in die Position 50% des vollen Hubs gefahren. Das Gehäuse des Stellantriebs ist sicher geerdet. Eine positive und negative 4kV-Kontaktentladung und anschließend eine positive und negative 8kV-Luftentladung werden gemäß den Anforderungen von GB/T 17626.2 an den Antrieb angelegt. Während dieser Prüfung werden die Änderungen des Ausgangssignals der Positionsrückmeldung oder der Hubwerte der Abtriebswelle (Stange) beobachtet und aufgezeichnet, um zu bestätigen, dass die Werte die Anforderungen von Abschnitt 6.2.9 dieser Norm erfüllen.
7.29 Netzfrequenz-Magnetfeld-Immunität
Im Leerlauf wird der Aktuator auf den externen Magnetfeldprüfstand gestellt und in die Position 50% des vollen Hubs bewegt. Die Magnetfeldstärke beträgt 400 A/m, und die Prüfrichtungen sind X/Y/Z, in Übereinstimmung mit GB/T 17626.8. Während dieser Prüfung werden die Änderungen des Ausgangssignals der Positionsrückmeldung oder der Hubwerte der Abtriebswelle (Stange) beobachtet und aufgezeichnet, um zu bestätigen, dass die Werte die Anforderungen von Abschnitt 6.2.10 dieser Norm erfüllen.
7.30 Erscheinungsbild
Mit visuellen und taktilen Methoden sollte geprüft werden, ob die Oberfläche eben und glatt ist und keine Risse, Grate oder andere Mängel aufweist, die das Aussehen beeinträchtigen. Die Oberflächenbeschichtung sollte sicher befestigt, flach, glatt und von gleichmäßiger Farbe sein und keine Ölflecken, Vertiefungen oder andere mechanische Beschädigungen aufweisen. Bei Betätigungselementen mit Anzeigefunktionen muss die Anzeige deutlich sichtbar sein, ohne dass Zeichen fehlen.
7.31 Schutzgrad des Gehäuses
Der IP67- oder IP65-Gehäusetest sollte gemäß der in GB 4208-2008 festgelegten Methode durchgeführt werden.
7.32 Explosionsgeschützte Leistung
Explosionssichere Prüfungen sollten von einer staatlich anerkannten Prüfstelle gemäß den Anforderungen von GB 3836.1 und GB 3836.2 durchgeführt werden.












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号