












1.アクチュエータをバルブに取り付ける
のインストール手順に従ってください。 「アクチュエータのバルブへの取り付け方 アクチュエータをバルブに正しく取り付け てください。バルブの動きを手動でテストし、正常な動作を確認します。
2.全閉位置のメカニカルリミットの調整
ハンドホイールを使ってバルブを 全閉位置.メカニカル・リミット・ストップが調整ねじやハウジングに触れていないことを確認してください。
を緩める。 スケールプレート固定ネジ目盛板を調整し、ポインターと目盛板が一直線になるようにします。 0度マーク (SHUT位置)に調整し、ロッキングスクリューを締めます。
3.全開位置のメカニカルリミットの調整
ハンドホイールを使ってバルブを 全開位置.メカニカル・リミット・ストップが調整ねじやハウジングに触れていないことを確認してください。
バルブのストロークが 90°の場合、ポインタは 0度マーク (OPENポジション)。
重要な注意事項
特に指定がない限り、工場でのデバッグの際、アクチュエータの全閉位置と全開位置の間のストロークの角度は、通常、以下の通りです。 90°.
バルブのマッチング後、操作部の全閉位置と全開位置がバルブの位置と一致していない場合は、調整を行う必要があります。メカニカルリミットが下図のように設定されていることを確認してください。
全てのモジュレーティングアクチュエータ(タイプ E)は、バルブマッチング時のポテンショメータの作動領域における潜在的なシフトを既に考慮しています。従って、ポテンショメーターとギアの調整は一般的に必要ありません。
配線端子は、サーボコントローラの破損を避けるため、図のように正しく接続してください。を接続しないでください。 「パワー に接続する。 「入力信号 または 「出力信号 端末

4.サーボコントローラーパネル説明
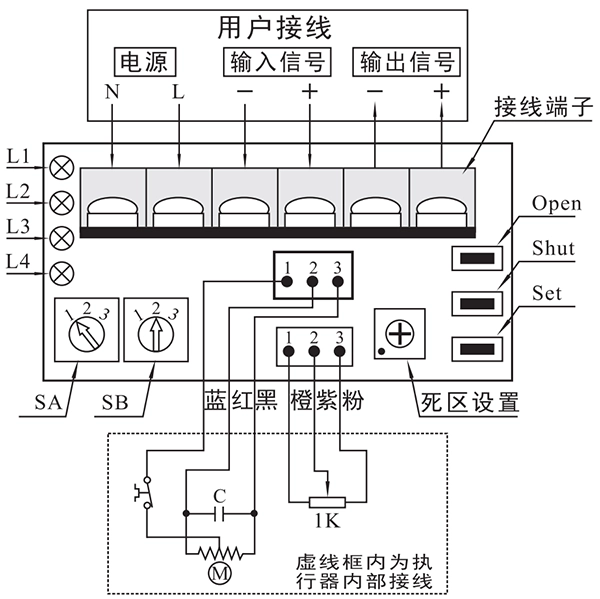
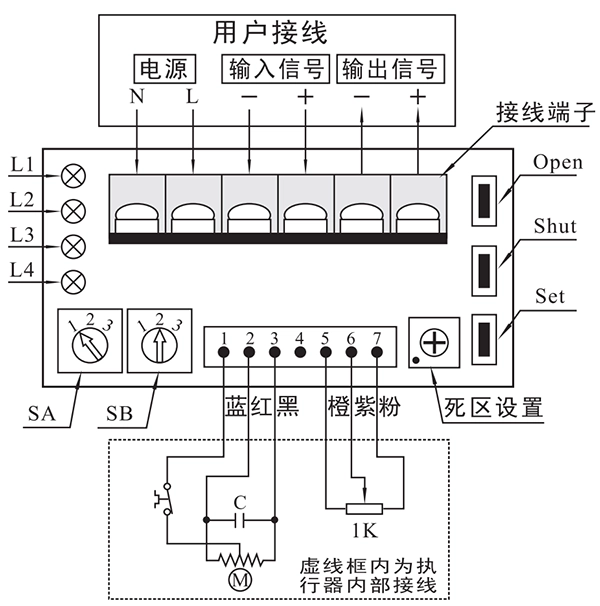
主な機能
オープンだ: で 「セット状態このキーを押すとバルブが開きます。離すと止まります。
シャットだ: で 「セット状態バルブを閉じるには、このキーを押します。離すと止まります。
セット: で 「セット状態と併用する。 オープン または シャット 特定の機能を達成するために。
選択スイッチ:
SA(信号選択): 入力信号の種類(ダイレクトまたはリバース)を選択し、状態を設定するスイッチです。電源を入れた状態で設定してください。
1 - 直接行動
2 - セット状態
3 - リバース・アクション
SB(信号障害処理): 信号障害をどのように処理するかを選択する。
1 - バルブ全開
2 - バルブが位置を維持
3 - バルブ全閉
デッドバンド設定ポテンショメーター:
デッドバンド値を 0.5%~5.0% (工場出荷時は 1.5%).各調整はデッドバンドを 0.5%.
指標:
L1(緑): 電源オ ン イ ン ジケー タ ( コ ン ト ロー ラ に電源が投入 さ れ る と 点灯)。
L2(赤): 入力信号障害インジケーター(入力信号に障害が発生すると点灯)。
L3(レッド): 位置検出回路の故障インジケーター(位置ポテンショメーターの配線や部品に問題がある場合に点灯)。
L4(レッド): 機械的ジャム障害インジケーター(機構にジャムがあると点灯)。
5.設定
セット状態に入る:
を設定する。 SAスイッチ 位置 2に入る。 セット状態ストローク校正、信号故障処理、不感帯設定、手動操作、出力電流校正などの機能を設定できる。
ストロークキャリブレーション:
フルクローズド・キャリブレーション:
用途 オープン または シャット を押してバルブを全閉位置に動かします。を押し続けます。 セット ボタンを押して シャット.両方のボタンを約 4秒 まで L2 が点灯します。両方のボタンを離し、全閉キャリブレーションを完了します。
全開キャリブレーション:
用途 オープン または シャット を押してバルブを全開位置に動かします。を押し続けます。 セット ボタンを押して オープン.両方のボタンを約 4秒 まで L2 が点灯します。両方のボタンを離し、全開較正を完了します。
入力信号の障害処理:
を使用する。 SBスイッチ で、システムが入力信号の障害をどのように処理するかを選択する:
1 - バルブ全開
2 - バルブが位置を保持
3 - バルブ全閉
注 SBスイッチ は自動運転中でも有効です。 SA に設定されている。 1 または 3).
デッドバンド値の設定:
を回転させる。 デッドバンドポテンショメーター 時計回りに回すとデッドバンドが増加し、反時計回りに回すとデッドバンドが減少します。増加するごとに、デッドバンドは 0.5%.工場出荷時のデフォルトは 1.5%.
を使用して手動でバルブを開閉することができます。 オープン または シャット のキーは セット状態.
6.操作
自動運転に入る:
を設定する。 SAスイッチ への 1 または 3 を入力する 自動運転.このモードでは、アクチュエータの位置と出力信号は入力信号の変化に追従する。
注:
で リバース・アクション, a 4mA 入力は 100% 一方 20mA 入力は 0% を開いた。
サーボ・コントローラーの精度レベルは クラス1基本誤差は ±1% ヒステリシスは 1%.
出力電流対バルブ位置:
| 入力信号 | 4mA | 8mA | 12mA | 16mA | 20mA |
|---|---|---|---|---|---|
| バルブ位置 | 0% | 25% | 50% | 75% | 100% |
| 出力電流 | 4mA | 8mA | 12mA | 16mA | 20mA |
7.出力電流校正
工場出荷時のキャリブレーション:
サーボコントローラーは工場出荷時に校正されているため、通常、ユーザーによる調整は必要ありません。ただし、全閉位置(4mA)または全開位置(20mA)での出力電流が、以下の値以上ずれた場合は、サーボ・コントローラの調整が必要です。 1%校正が必要かもしれません。
校正ステップ:
を接続する。 20mA DC電流計 を出力する。
を設定する。 SAスイッチ への 2 を入力する セット状態.
を押し続ける。 セット ボタンを押すと同時に オープン そして シャット ボタンをクリックする。
いつ L2 が点灯し、すべてのボタンを離すと、システムは以下の状態になります。 4mA校正.に電流を調整する。 4mA を使用している。 オープン そして シャット キーだ。
終了後 4mA校正を押し続ける。 セット を待つ。 L2 が点灯します。次にそれを離すと 20mA校正 に電流を調整する。 20mA.
8.故障診断とトラブルシューティング
故障表示灯:
L2が点灯:
入力信号の不具合-入力信号の電圧をチェックしてください。電圧が異常な場合(0.88~4.4Vの範囲外)、回路が開いていないか、回路がショートしていないか、信号源が正しくないかを確認する。
L3が点灯:
ポテンショメーターに開回路、短絡、損傷などの問題がないか確認します。L4が点灯:
機械的な詰まり:モータの接続部とアクチュエータに詰まりがないかチェックします。
バルブと信号の不一致:
アクチュエータのストロークと入力信号が一致しない場合、またはアクチュエータがフルストロー クできない場合は、サーボコントローラまたは不感帯設定ポテンショメータ回路の異常が考えられます。
詳細については、各フォルトコードに記載されているトラブルシューティング手順に従ってください。












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号