












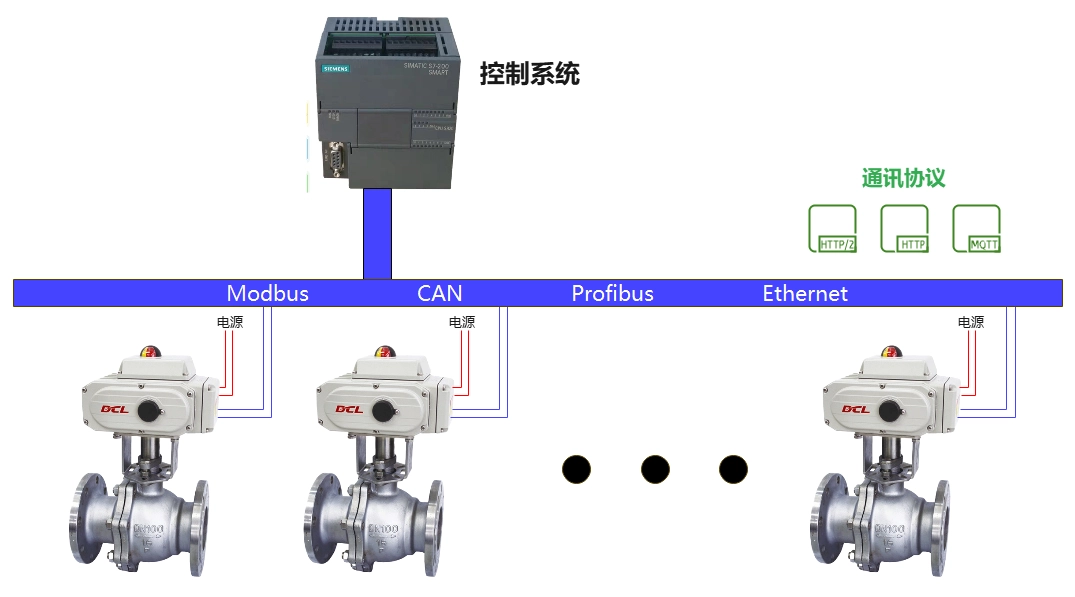
Os actuadores da série DCL suportam o protocolo Modbus-RTU. Ao consultar este manual de aplicação, pode ligar o atuador DCL ao Modbus.
Descrição do painel
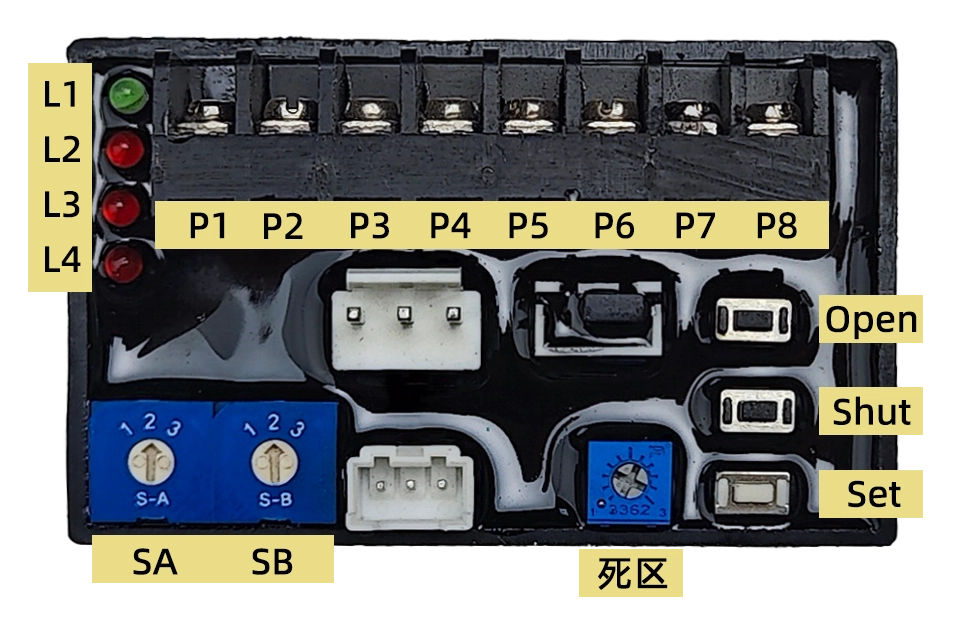
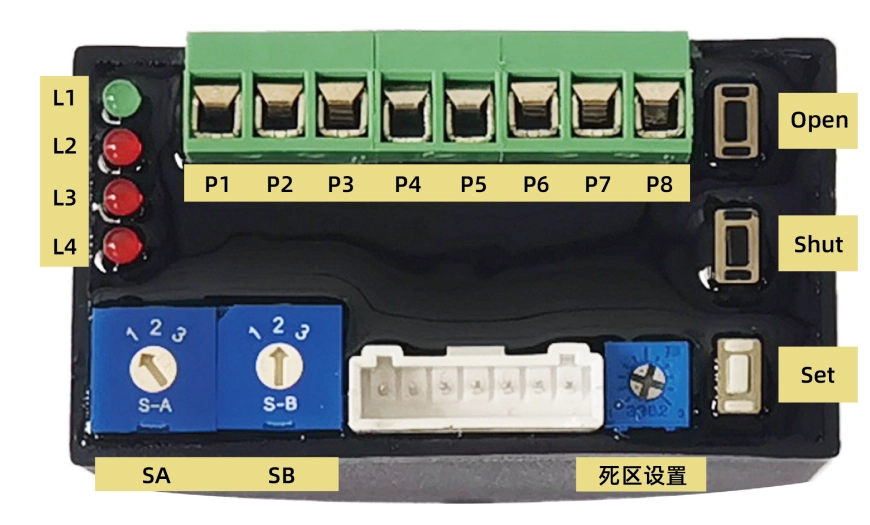
1. Definição da interface
P1: 220VAC Neutro (N)
P2: 220VAC em tensão (L)
P3: Entrada 4-20mA -
P4: Entrada 4-20mA +
P5: Saída 4-20mA -
P6: Saída 4-20mA +
P7: RS485 A
P8: RS485 B
2. Botões
Aberto: No "Modo de Configuração" (quando o interrutor SA aponta para "2"), pressionar esta tecla abre o atuador e soltá-la pára o motor. Premir Conjunto e Aberto é utilizado simultaneamente para a calibração da posição de abertura total.
Fechar: No "Modo de Configuração", pressionar esta tecla fecha o atuador, e soltá-la pára o motor. Premir Conjunto e Fechar é utilizado simultaneamente para a calibração da posição de fecho total.
Conjunto: Utilizado em combinação com Aberto e Fechar no "Modo de configuração" para efetuar funções específicas.
3. Interruptor seletor
SA: Seleciona o modo de ação direta/reversa do sinal de entrada e o estado de configuração. Tem de ser definido enquanto estiver ligado para ser efetivo. A predefinição de fábrica é 1:
1 - Ação direta
2 - Modo de configuração
3 - Ação inversa
SB: Define a posição de segurança. Quando se perde um sinal de controlo externo, o atuador move-se para a posição especificada. A predefinição de fábrica é 2:
1 - Passar para abertura total
2 - Manter a posição atual
3 - Passar para o fecho total
Nota: Quando se utiliza o controlo Modbus, SB deve ser colocado na posição 2.
4. Potenciómetro de ajuste do valor da banda morta
Ajusta o valor da banda morta. Rodar no sentido dos ponteiros do relógio aumenta a banda morta; no sentido contrário diminui. O intervalo é 0.5% – 5.0% (a predefinição de fábrica é 1.5%).
5. Luzes indicadoras
L1 (Verde): Indicador de alimentação - Acende-se quando a alimentação é fornecida.
L2 (Vermelho): Indicador de falha do sinal de entrada - Acende-se quando o sinal de entrada falha.
L3 (Vermelho): Indicador de falha na deteção de posição - Acende-se se o potenciómetro de posição estiver aberto, em curto-circuito ou danificado.
L4 (Vermelho): Indicador de falha de encravamento - Acende-se quando ocorre um encravamento.
Definições
Para aceder ao "Setup Mode", defina SA para posicionar 2. Este modo permite:
Calibração de viagens
Tratamento de falhas do sinal de entrada
Ajuste do valor da banda morta
Funcionamento manual
Calibração da corrente de saída
1. Definição da posição final
Definir a posição final do fecho: Ajustar a válvula para a posição final de fecho utilizando Aberto e/ou Fechar botões. Prima Conjunto, então Fechare manter ambos durante cerca de 4 segundos até L2 acende-see, em seguida, solte ambos os botões. L2 desliga-se, indicando a conclusão da definição.
Definição da posição final de Abrir: Ajustar a válvula para a posição final de aberta utilizando Aberto e/ou Fechar botões. Prima Conjunto, então Abertoe manter ambos durante cerca de 4 segundos até L2 acende-see, em seguida, solte ambos os botões. L2 desliga-se, indicando a conclusão da definição.
2. Definição do endereço Modbus
O endereço de comunicação Modbus e a velocidade de transmissão podem ser modificados através de comandos Modbus.
Endereço predefinido de fábrica: 1
Taxa de transmissão predefinida de fábrica: 9600
3. Ajuste do valor da banda morta
Rodar o potenciómetro no sentido dos ponteiros do relógio aumenta a banda morta.
Transformando-o sentido anti-horário diminui a banda morta.
Cada marca de seleção corresponde a uma alteração de 0,5%.
Se definido abaixo 0.5%, é automaticamente processado como 0.5%.
Em Modo de configuração, utilizar Aberto ou Fechar para abrir ou fechar manualmente a válvula.
Funcionamento
Para iniciar o funcionamento automático, definir SA para posicionar 1 ou 3.
Ao ligar a alimentação, o atuador é predefinido para Controlo do sinal 4-20mA.
O envio de um comando Modbus comuta o atuador para modo de controlo da comunicação.
Após o ciclo de energia, o atuador volta a modo de controlo analógico.
Importante: Quando se utiliza o controlo Modbus:
Assegurar SB está definido para a posição 2.
Cada comando de controlo deve incluir o modo de controlo e valor de posição para evitar acções não intencionais após um reinício.
Utilização de 4-20mA para controlo de posição
| Sinal de entrada | 4mA | 8mA | 12mA | 16mA | 20mA |
|---|---|---|---|---|---|
| Posição do ponteiro | FECHAR (0) | 2.5 | 5 | 7.5 | ABERTO (100) |
| Abertura da válvula (%) | 0% | 25% | 50% | 75% | 100% |
| Sinal de saída | 4mA | 8mA | 12mA | 16mA | 20mA |
Nota:
Em modo de ação inversa, 4mA corresponde a 100% abertoe 20mA corresponde a 0% aberto.
Nível de precisão do servo controlador: ±1%
Histerese: <1%
Utilizar o Modbus para controlar a posição do atuador
Camada física
O atuador DCL suporta o Modbus-RTU e utiliza o protocolo Interface RS485 na camada física.
Endereço de comunicação: Configurável a partir de 1 a 127, a predefinição é 1.
Taxa de transmissão: Configurável, a predefinição é 115200.
Formato da porta de série: 1 bit de arranque + 8 bits de dados + 1 bit de paragem.
Funcionalidade de difusão: Apoiado.
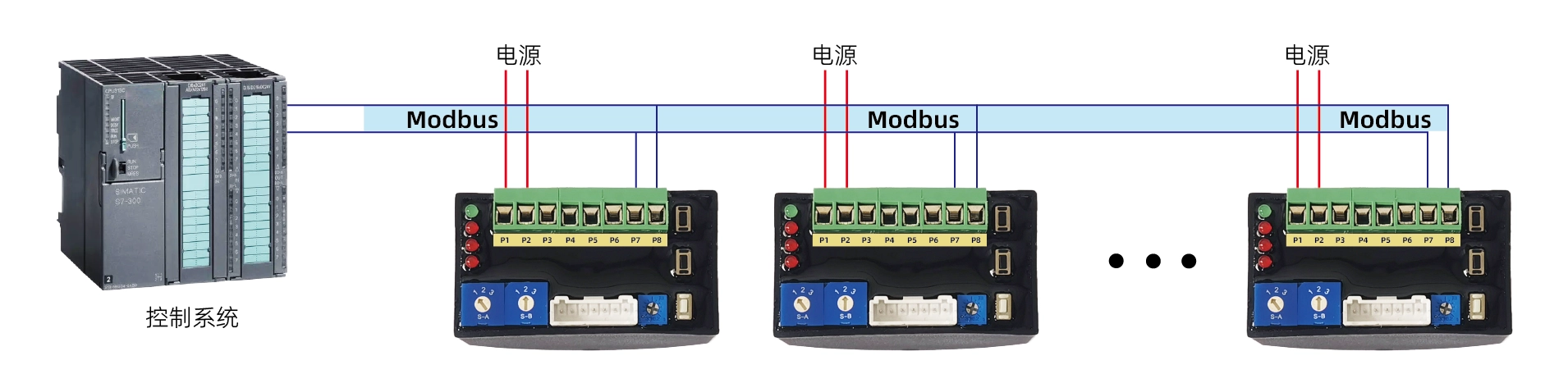
Definição da interface
| Pino | Função |
|---|---|
| P1 | Potência (-) |
| P2 | Potência (+) |
| P7 | RS485 A |
| P8 | RS485 B |
| P3~P6 | Reservado para sinais analógicos (4 |
Diagrama de cablagem Modbus
Camada de aplicação
1. ADU (Unidade de Dados de Aplicação)

2. Códigos de função
| ID | Nome | Descrição |
|---|---|---|
| 0x03 | Ler vários registos | Lê um bloco de registos de espera a partir de um dispositivo remoto. |
| 0x06 | Escrever um único registo | Escreve um único registo num dispositivo remoto. |
| 0x10 | Escrever vários registos | Escreve um bloco de registos consecutivos (1 a aproximadamente 120 registos). |
3. Configuração dos parâmetros de comunicação
Registos 0x0040 - 0x0042 são utilizados para definições de comunicação:
Escrever 0xA501 para se registar 0x0040 para entrar modo de configuração.
Modificar registo 0x0041 (endereço de comunicação) e registo 0x0042 (taxa de transmissão).
Os novos parâmetros entram em vigor dentro de 1 segundoe as comunicações posteriores devem utilizar as definições actualizadas.
Sair do modo de configuração escrevendo 0x0000 para registo 0x0040.
4. Forçar o modo de comunicação por defeito
Conjunto SA para posição 2 e SB para posição 2.
Premir e manter premido o botão Botão KS por cerca de 3 segundos até que o a luz vermelha piscae, em seguida, soltar o botão.
Premir e manter premido o botão Botão KC por cerca de 3 segundos até que o a luz vermelha mantém-se acesae, em seguida, soltar o botão.
Os parâmetros de comunicação são agora repor os valores por defeito.
Conjunto SA voltar para posição 1 para sair deste modo.
As novas definições mantêm-se mesmo depois de reiniciar o dispositivo.
Nota:
Se se esquecer dos parâmetros de comunicação anteriores, utilize este método para restaurar o modo de comunicação predefinido e configurar novamente as definições de comunicação.
Lista de registos
| Endereço de registo | Bits | Grupo | Nome do sinal | Valor mínimo | Valor máximo | Unidade | R/W | Tipo | Descrição |
|---|---|---|---|---|---|---|---|---|---|
| 0x0010 | b15-b5 | – | – | – | – | – | r/w | hexágono | Reservado (0) |
| b4 | controlo | Parar | – | – | – | – | r/w | hexágono | 1: Paragem, 0: Funcionamento normal |
| b1-b0 | controlo | Modo | – | – | – | – | r/w | hexágono | 1: Controlo de comunicação, outros: Controlo de comunicação de saída |
| 0x0011 | b15-b0 | controlo | SetOpenDegree | 0 | 10000 | % | r/w | int/hex | 0-10000 corresponde à abertura da válvula 0-100% (fator de escala: 1/100) |
| 0x0018 | b15-b6 | – | – | – | – | – | r | hexágono | Reservado (0) |
| b5 | informação | errPosição | – | – | – | – | r | hexágono | 1: Falha do sinal de posição |
| b4 | informação | errSinal | – | – | – | – | r | hexágono | 1: Falha do sinal de entrada |
| b3 | informação | bandeira overTorqueFlag | – | – | – | – | r | hexágono | 1: Sobrecarga detectada |
| b2 | informação | stuckFlag | – | – | – | – | r | hexágono | 1: Deteção de interferências |
| b1 | informação | openRunFlag | – | – | – | – | r | hexágono | 1: Válvula de abertura |
| b0 | informação | closeRunFlag | – | – | – | – | r | hexágono | 1: Válvula de fecho |
| 0x0019 | b15-b0 | informação | openDegree | 0 | 10000 | % | r | int/hex | 0-10000 corresponde à abertura da válvula 0-100% (fator de escala: 1/100) |
| 0x0040 | b15-b0 | configuração | cfgMode | 1 | 127 | – | rw | hexágono | 0x0000: Modo normal, 0xA501: Modo de configuração |
| 0x0041 | b15-b0 | configuração | cmm_addr | 1 | 127 | – | rw | hexágono | Define o endereço de comunicação |
| 0x0042 | b15-b0 | configuração | cmm_baudrate | – | – | – | rw | hexágono | 0: 4800 baud, 1: 9600 baud, 2: 19200 baud, 3: 115200 baud |
Exemplos de comandos de comunicação
1. Posição da válvula de controlo
Entrar no modo de controlo da comunicação:
Enviar → ◇01 10 00 10 00 01 02 00 01 65 00
Receber ← ◆01 10 00 10 00 01 00 0C
Ajuste da posição da válvula: 0%
Enviar → ◇01 10 00 11 00 01 02 00 00 A5 11
Receber ← ◆01 10 00 11 00 01 51 CC
Definição da posição da válvula: 50% (5000 → 0x1388)
Enviar → ◇01 10 00 11 00 01 02 13 88 A8 47
Receber ← ◆01 10 00 11 00 01 51 CC
Definição da posição da válvula: 100% (10000 → 0x2710)
Enviar → ◇01 10 00 11 00 01 02 27 10 BF 2D
Receber ← ◆01 10 00 11 00 01 51 CC
Paragem da operação
Enviar → ◇01 10 00 10 00 01 02 00 11 64 CC
Receber ← ◆01 10 00 10 00 01 00 0C
2. Ler o estado da válvula
Enviar → ◇01 03 00 18 00 02 44 0C
Receber ← ◆01 03 04 00 30 00 00 00 FA 3C
3. Definir o endereço de comunicação
Entrar no modo de configuração:
Enviar → ◇01 10 00 40 00 01 02 A5 01 12 00
Receber ← ◆01 10 00 40 00 01 00 1D
Alterar o endereço de comunicação para: 2
Enviar → ◇01 10 00 41 00 01 02 00 02 28 80
Receber ← ◆01 10 00 41 00 01 51 DD
Sair do modo de configuração:
Enviar → ◇02 10 00 40 00 01 02 A5 00 C7 30
Receber ← ◆02 10 00 40 00 01 00 2E
4. Definir a taxa de transmissão da comunicação
Entrar no modo de configuração:
Enviar → ◇01 10 00 40 00 01 02 A5 01 12 00
Receber ← ◆01 10 00 40 00 01 00 1D
Alterar a taxa de transmissão para: 9600
Enviar → ◇01 10 00 42 00 01 02 00 01 68 B2
Receber ← ◆01 10 00 42 00 01 A1 DD
Sair do modo de configuração:
Enviar → ◇01 10 00 40 00 01 02 A5 00 D3 C0
Receber ← ◆01 10 00 40 00 01 00 1D












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号