












Actionneur ultra-compact
DCL-02
- Petite taille comme une canette de cola
- Coque en alliage d'aluminium haute résistance pour une protection solide.
- Haute performance EMI.


Direction du mouvement
Demi-tour
Amortisseur
0 - 270°
Couple/Temps de fonctionnement
9~18Nm
7~60S
Type de droit
Modulante
Activé - Désactivé
Tension d'alimentation
DC24V
AC110V
AC220V
Signal d'entrée/sortie
4 - 20mA
0 - 10V
Interface IO
Options supplémentaires
Déshumidification
Type de droit
Modulante
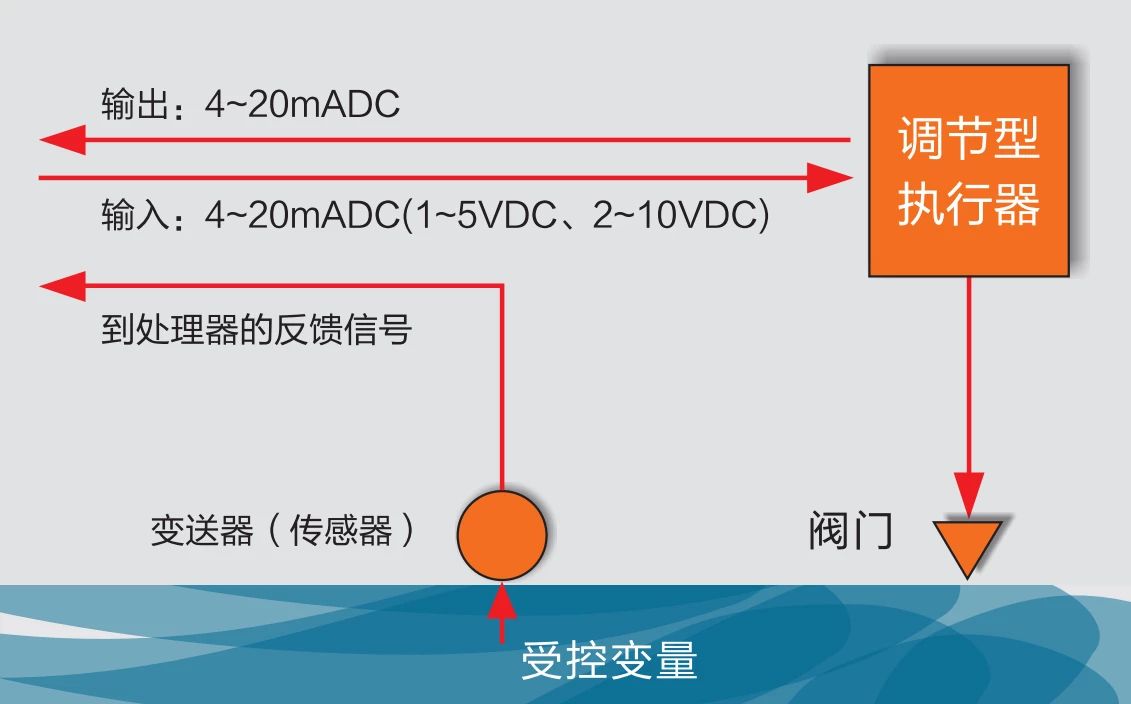
L'actionneur lit la valeur de la position cible à partir du système de contrôle par l'intermédiaire de 4-20mA, 2-10V ou d'un bus de terrain tel que modbus, ethernet, etc.
L'actionneur conduit ensuite la vanne à la position cible à l'aide d'un algorithme de contrôle intérieur.
L'actionneur émet toujours la position du robinet en temps réel par l'intermédiaire de 4-20mA, 2-10V ou bus de terrain.
Fonctionnant en type de service S4, l'actionneur peut démarrer 1200 fois par heure.
Activé - Désactivé
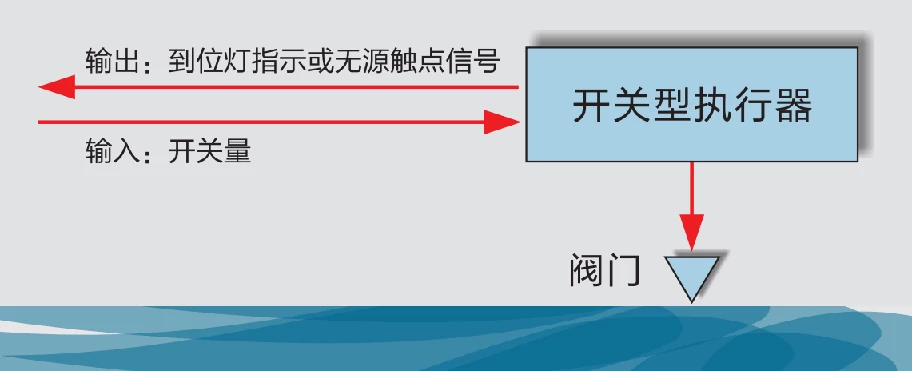
L'actionneur lit la demande d'ouverture ou de fermeture du système de contrôle par l'intermédiaire d'une interface E/S telle qu'un signal passif ou un signal actif 24VDC/220VAC.
Ensuite, l'actionneur conduit la vanne à la position finale OUVERT ou FERMÉ selon le signal d'entrée requis.
L'actionneur émet un signal de retour OUVERT ou FERMÉ lorsque la position finale est atteinte.
Utilisé dans le type de service S2, l'actionneur peut actionner la vanne en continu pendant 15 minutes.
Caractéristiques
Moteur avec protection contre la surchauffe
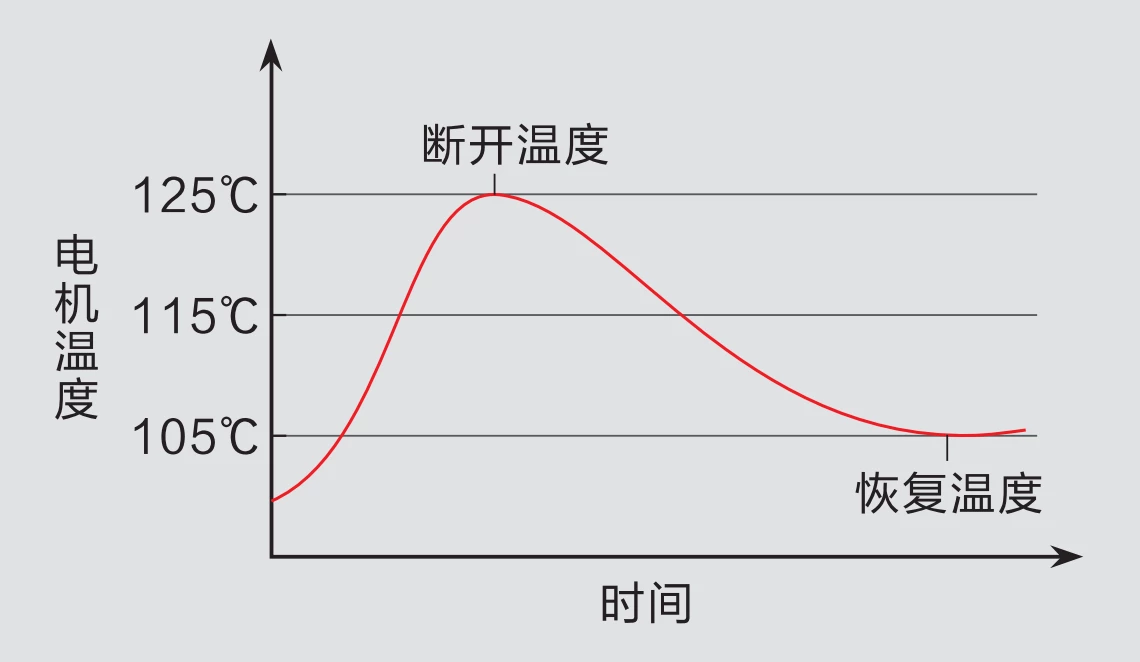
DCL conçoit spécialement le moteur pour répondre aux exigences de l'actionneur, de sorte que le moteur de l'actionneur DCL peut fournir un couple de démarrage élevé tout en maintenant un rendement élevé dans la phase de démarrage afin de rendre l'augmentation de la température aussi faible que possible. Pendant ce temps le moteur a un faible moment d'inertie pour assurer la haute précision de la modulation.
Le moteur est équipé d'un dispositif de protection contre la surchauffe qui coupe l'alimentation lorsque la température du moteur dépasse la température limite (105℃/85℃ peut être sélectionnée en fonction du scénario d'application) et reconnecte l'alimentation lorsque la température revient en dessous de la température normale.
Limiteur à double position
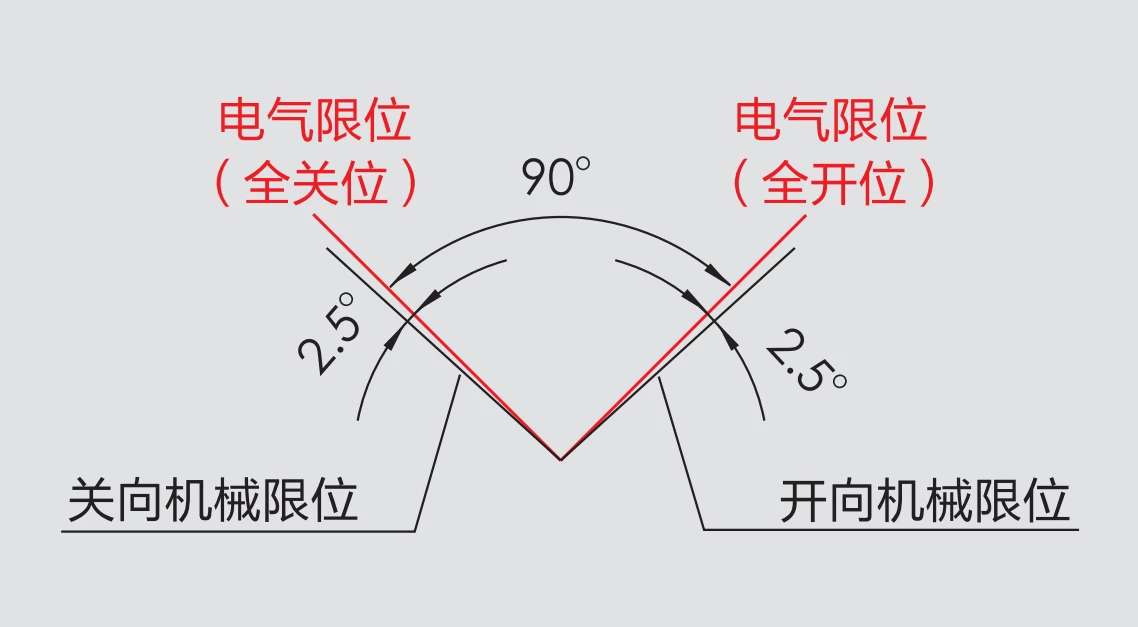
Il y a 2 dispositifs de limite de position pour protéger la vanne contre les dommages causés par un fonctionnement au-delà de l'angle d'oscillation.
Les interrupteurs de fin de course électriques sont montés sur les deux positions finales OUVERT et FERMÉ. Ainsi, l'alimentation du moteur sera coupée pour arrêter l'entraînement de la vanne une fois que la position de fin de course limitée aura été atteinte.
Il y a également deux limiteurs mécaniques montés sur l'arbre de sortie pour protéger la vanne de l'oscillation au-delà de la plage de course. Le limiteur mécanique ne prend pas effet en fonctionnement normal car l'interrupteur de fin de course électrique précède le limiteur mécanique et se déclenche avant que l'arbre de sortie n'atteigne la position limitée par le limiteur mécanique.
Paramètres techniques
| Alimentation électrique | DC24V, AC24V, AC110V, AC220V |
| Couple standard/temps | 18Nm/15S |
| Option Couple/Temps | 9Nm/7S, 18Nm/60S |
| Gamme d'angles de rotation | 0~90° |
| Puissance/Courant du moteur | DC24V:8W / 0.7A AC24V:6W / 1.3A AC110V: 6W / 0.3A AC220V:6W / 0.15A |
| Circuit de contrôle | DC24V : type E/type G |
| Poids | 1,2 kg |
| Résistance de l'isolation | DC24V/AC24V:100MΩ/250VDC AC110V/AC220V:100MΩ/500VDC |
| Tension de résistance | DC24V/AC24V : 500VAC pendant 1 minute |
| Niveau d'étanchéité | IP67 |
| Orientation de l'installation | Installation à 360° dans n'importe quel angle |
| Interface électrique | Connexion du câble à 7 conducteurs |
| Température de fonctionnement | -25℃ ~ +55℃ |
| Sélection des fusibles | DC24V:2A AC24V:3A AC110V/AC220V:1A |
| DCL-02 Paramètres de contrôle réglables | |
| Signal d'entrée | 4~20mA, 0~10V étalonnage arbitraire |
| Signal de sortie | 4~20mA, 0~10V étalonnage arbitraire |
| Bus | 485/Modbus/CAN |
| Internet des objets | WIFI/LoRA/4G |
| Erreur de base | ≤±1% |
| Vérifier le retour | ≤1% |
| Hystérésis | Hystérésis adaptative, personnalisée |
| Temps de repositionnement | 0 fois |
| Erreur de répétabilité | ≤1% |
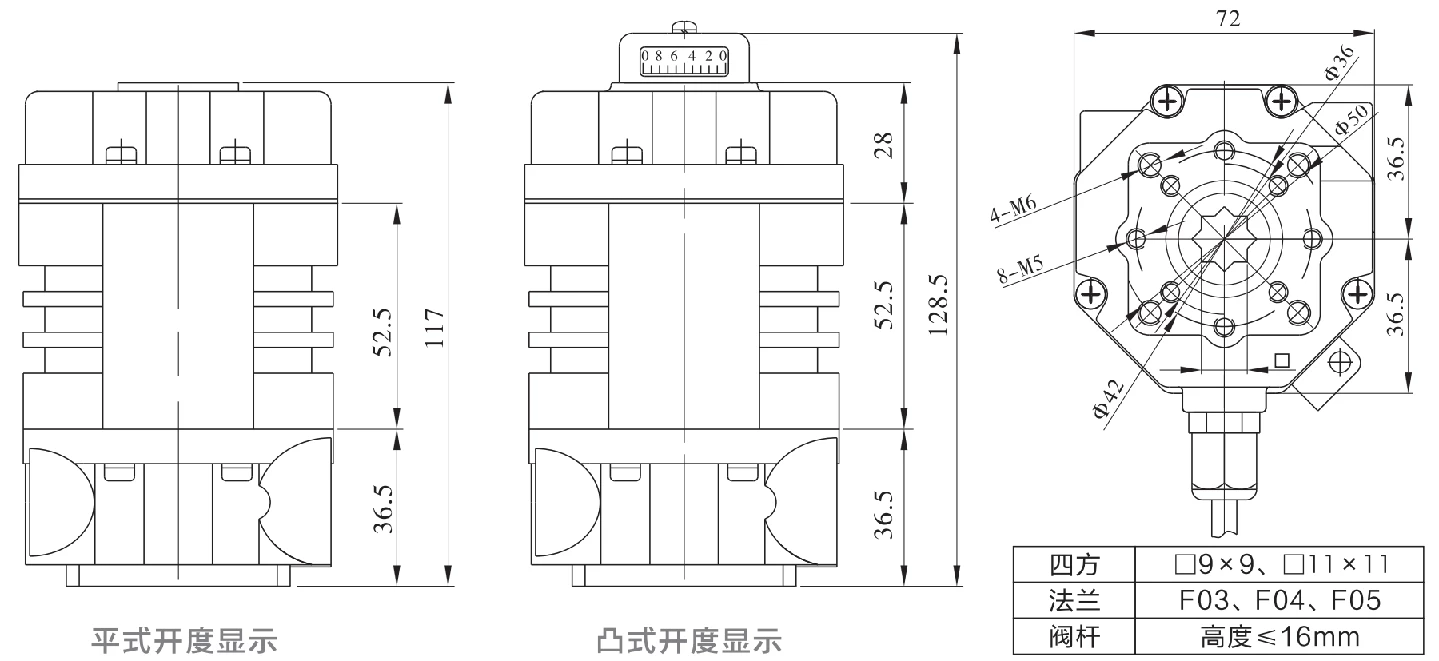
Dimensions
Circuit d'application
Modulante
E - Modulation à l'aide d'une unité de commande
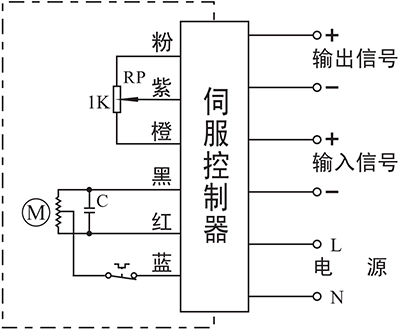
- Entrée : 4~20mA / 0~10V
- Sortie : 4~20mA / 0~10V
Détails du raccordement :
- Connecter la ligne d'alimentation AC85-220V à L et le neutre à N.
- Connexion de la source du signal d'entrée 4-20mA/2-10V du système de contrôle à l'entrée-/+.
- Connexion de la sortie -/+ au système pour envoyer la position de la vanne en temps réel.
Activé - Désactivé
A - Avec 2 sorties actives de signal de fin de course
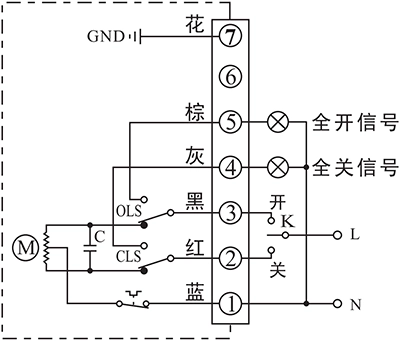
- Commander l'ouverture ou la fermeture de l'actionneur avec K
- La borne de sortie de la position finale OUVERT/FERMÉ enverra l'événement sous la forme d'un signal actif 220VAC lorsque la position finale a été atteinte.
Détails du raccordement :
- Connecter le neutre de l'alimentation AC85-220V à P1.
- Commuter la ligne AC85-220V sur CLOSE(P2) pour fermer la vanne.
- Mettre la ligne AC85-220V sur OPEN(P3) pour ouvrir la vanne.
- P5 est la borne de fin de course OUVERT qui émet une source de 220V AC qui peut être utilisée pour piloter une lampe d'indication lorsque l'actionneur a atteint la position de fin de course ouverte.
- P6 est la borne de fin de course OUVERT qui émet une source de courant alternatif 220V qui peut être utilisée pour piloter une lampe d'indication lorsque l'actionneur a atteint la position de fin de course de fermeture.
- Connecter la terre à P7.
B - Avec 2 interrupteurs passifs de fin de course
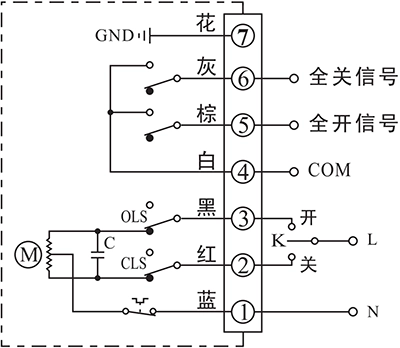
- Commander l'ouverture ou la fermeture de l'actionneur avec K
- La borne de sortie de la position finale OUVERT/FERME émet un signal passif lorsque la position finale est atteinte.
Détails du raccordement :
- Connecter le neutre de l'alimentation AC85-220V à P1.
- Commuter la ligne AC85-220V sur CLOSE(P2) pour fermer la vanne.
- Mettre la ligne AC85-220V sur OPEN(P3) pour ouvrir la vanne.
- P4 est le COM pour le signal de contact passif de la position finale OUVERT/FERME qui est normalement connecté au signal GND.
- P5 est la borne de fin de course OUVERT qui sera connectée à COM lorsque l'actionneur aura atteint la position de fin de course ouverte.
- P6 est la borne de fin de course de fermeture qui sera connectée à COM lorsque l'actionneur aura atteint la position de fin de course de fermeture.
- Connecter la terre à P7.
G - Moteur à courant continu avec 2 interrupteurs de fin de course
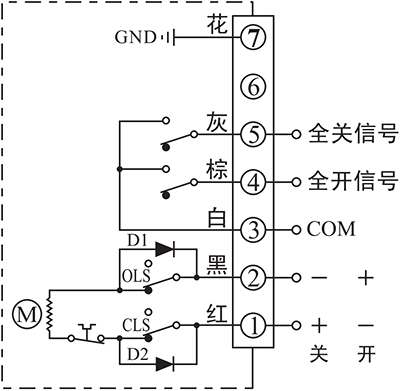
- L'actionneur de commande s'ouvre ou se ferme en fonction de la direction de l'alimentation entre les bornes 1 et 2.
- La borne de sortie de la position finale OUVERT/FERME émet un signal passif lorsque la position finale est atteinte.
Détails du raccordement :
- Connecter DC24V+ à P1 et DC24V- à P2 pour fermer la vanne.
- Connecter DC24V+ à P2 et DC24V- à P1 pour fermer la vanne.
- P3 est le COM pour le signal de contact passif de la position finale OUVERT/FERME qui est normalement connecté au signal GND.
- P4 est la borne de fin de course OUVERT qui sera connectée à COM lorsque l'actionneur aura atteint la position de fin de course ouverte.
- P5 est la borne de fin de course de fermeture qui sera connectée à COM lorsque l'actionneur aura atteint la position de fin de course de fermeture.
- Connecter la terre à P7.
Note:
- Le circuit à l'intérieur de la boîte en pointillés est le circuit interne de l'actionneur. Le circuit à l'extérieur est une démonstration de la connexion électrique pour l'utilisation de l'actionneur.
- Si vous avez d'autres exigences spécifiques concernant le circuit de connexion, n'hésitez pas à contacter notre service d'assistance technique.












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号