












Les actionneurs DCL supportent le protocole Modbus-RTU. En vous référant à ce manuel d'application, vous pouvez connecter les actionneurs DCL au protocole Modbus.

Panel
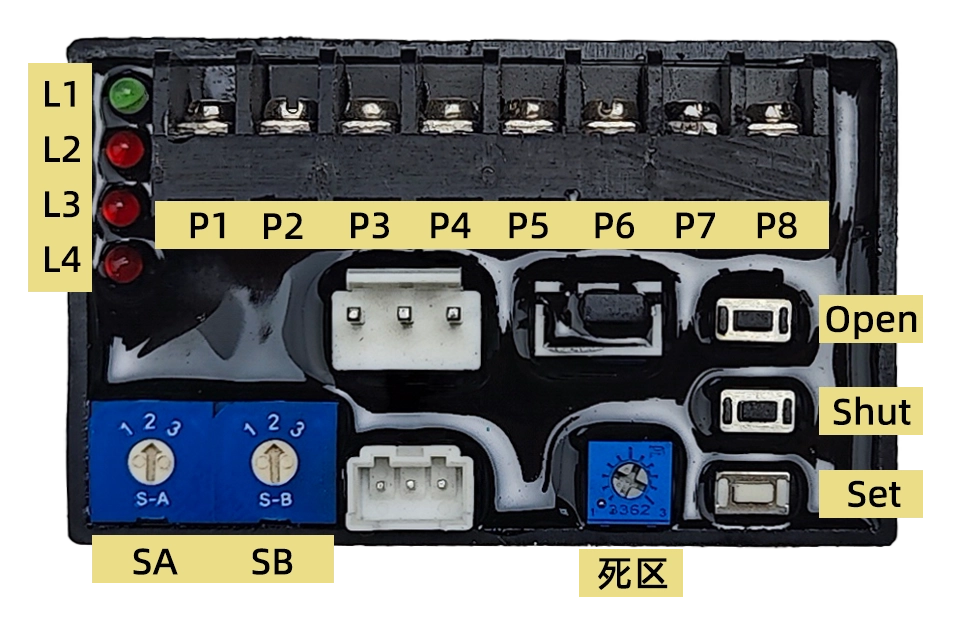
1. Définition de l'interface
P1:220VAC N
P2:220VAC L
P3:4-20mA Input -
P4:4-20mA Input+ (entrée)
P5:4-20mA Sortie-
P6:4-20mA Output+ (sortie 4-20mA)
P7:RS485 A
P8:RS485 B
2. Bouton
Ouvrir: Utilisé en mode réglage. Appuyez sur ce bouton pour ouvrir l'actionneur et relâchez-le pour l'arrêter. Appuyer simultanément sur Set et Open pour régler la position d'ouverture totale.
Nulle part ailleurs: Utilisé en mode réglage. Appuyer sur ce bouton pour fermer l'actionneur et le relâcher pour l'arrêter. Appuyer simultanément sur Set et Open pour régler la position de fermeture complète.
Fixer: Utilisé en mode réglage. Combinaison Utilisez ce bouton avec d'autres pour régler les paramètres.
3. Interrupteur
SA: Définir le mode de fonctionnement
1-Modulation normale
2-Mode de réglage
3-Modulation inverse
SB: Définir la position de sécurité (2 par défaut)
1 - Conduire jusqu'à l'ouverture complète
2-Maintien de la position
3-Drive to Fully Shutter
4. Hystérésis
Régler une valeur d'hystérésis de 0,5% à 5% avec une échelle de 0,5%.
L'actionneur ne modifie pas la position de la vanne jusqu'à ce que l'écart entre la position indiquée par le signal d'entrée et la position actuelle de la vanne soit supérieur à la valeur d'hystérésis.
5. Indication
L1: Vert, Indication d'alimentation;
L2: Rouge, erreur de signal d'entrée, s'allume lorsque le signal d'entrée est en dehors de la plage;.
L3: Rouge, erreur de potentiomètre, s'allume lorsque le potentiomètre est anormal ou que le fil de connexion est rompu;.
L4: Rouge, Erreur de blocage, s'allume lorsque l'actionneur ne peut pas être piloté pour s'ouvrir ou se fermer.
Mise en place
Commutez SA sur 2 pour entrer dans le mode de réglage. Vous pouvez alors régler la plage de rotation de l'opération, la position de sécurité, calibrer le signal d'entrée et de sortie, etc.
1. Définir la plage de fonctionnement
Position de fermeture complète:
- Appuyer sur le bouton KO/KC pour amener la vanne en position de fermeture complète.
- Maintenez le bouton KS puis le bouton KC enfoncés jusqu'à ce que L2 s'allume, environ 3-4 secondes plus tard, ce qui signifie que la configuration de la position de fermeture complète est effectuée.
- Vous pouvez maintenant relâcher ces deux boutons.
Régler la position d'ouverture complète :
- Appuyer sur le bouton KO/KC pour amener la vanne en position d'ouverture complète.
- Maintenez le bouton KS puis le bouton KO enfoncés jusqu'à ce que L2 s'allume, environ 3-4 secondes plus tard, ce qui signifie que la configuration de la position d'ouverture complète est terminée.
- Vous pouvez maintenant relâcher ces deux boutons.
Remarque : Lorsque les positions d'ouverture et de fermeture complètes ont été configurées avec la même position, la configuration sera effectuée avec succès. Mais l'actionneur ne tournera pas en mode modulation.
2. Régler les paramètres Modbus
- Les registres de 0x0040 à 0x0042 sont utilisés pour définir les paramètres de communication.
- Entrez d'abord dans le mode de réglage en écrivant la valeur 0xA501 dans le registre 0x0040, puis réglez l'ID de l'esclave et la vitesse de transmission en écrivant des valeurs dans les registres 0x0041 et 0x0042.
- Les nouveaux paramètres seront mis à jour dans 1S.
- Quitter le mode de réglage en écrivant 0x0000 dans le registre 0x0040.
Début de la modulation
Tourner SA sur 1 pour démarrer la modulation.
- Après la mise sous tension, l'actionneur suit par défaut le signal d'entrée 4-20 mA pour la modulation.
- L'envoi de commandes via modbus permet à l'actionneur de fonctionner en mode de contrôle de communication et de revenir automatiquement en mode de contrôle analogique après la mise hors tension et la remise sous tension de l'actionneur.
Modulation avec 4-20mA
- L'actionneur entraîne la vanne dans la position spécifique indiquée par le signal d'entrée 4-20mA.
- Le signal de sortie 4-20mA indique la position de la vanne en temps réel.
- La "sortie ON/OFF ouverte" émet un signal effectif (connecter à COM) lorsque la vanne a été conduite en position complètement ouverte.
- La "sortie ON/OFF Shut" émet un signal effectif (connecter à COM) lorsque la vanne a été conduite en position de fermeture complète.
- L'actionneur entraîne la vanne en position de sécurité lorsque l'alimentation électrique est interrompue ou que le signal d'entrée est défectueux.
- L'actionneur reviendra en mode modulation après le rétablissement de l'alimentation et du signal d'entrée.
Note : Vous pouvez tourner SW2 sur 3 pour activer l'opération inverse. Dans ce cas, la valeur d'entrée de 4mA sera transférée à 20mA, et 20mA sera transféré à 4mA. La modulation est donc inversée.
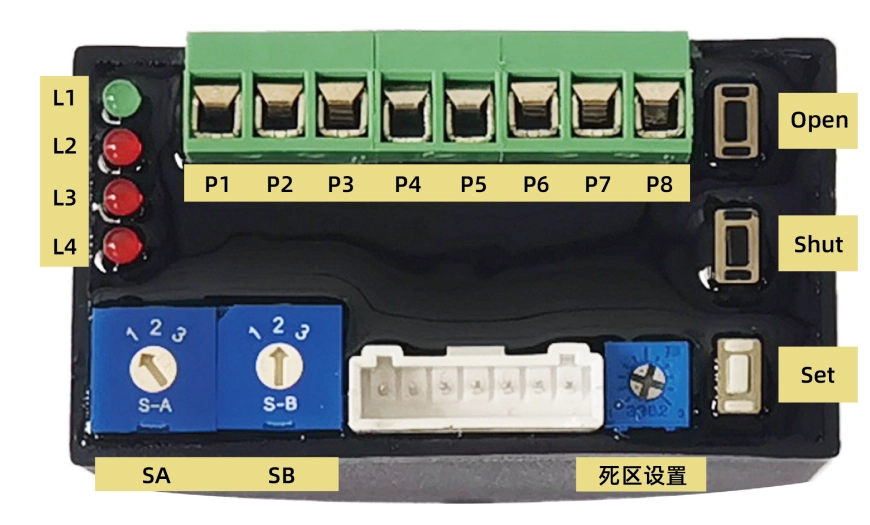
Modulation avec Modbus-RTU/RS485
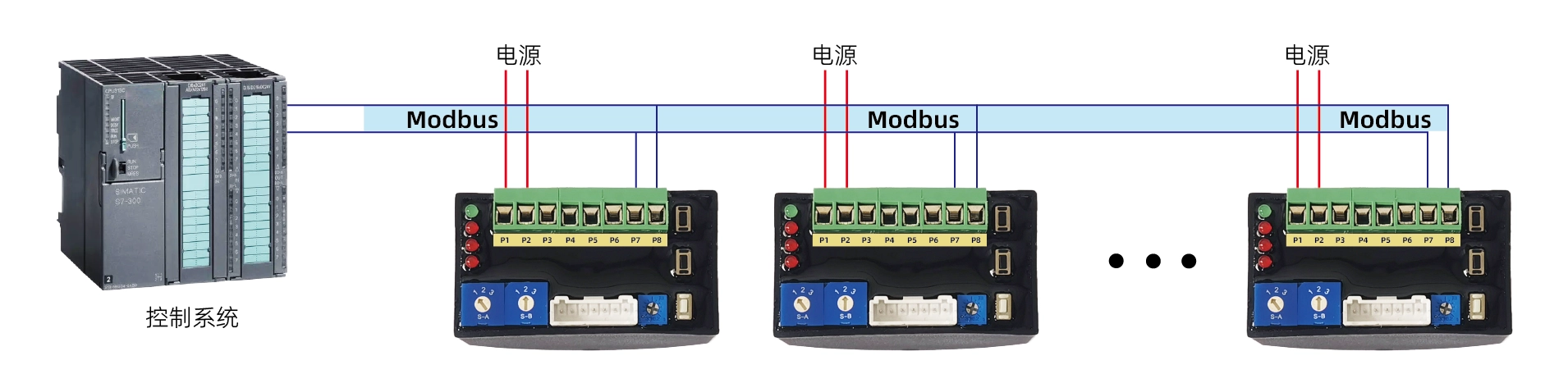
Couche matérielle
- L'actionneur DCL supporte le protocole Modbus-RTU,RS485 est utilisé dans la couche physique。
- ID esclave : 1 par défaut
- Vitesse de transmission:Configurable avec une valeur par défaut de 9600
- Format des données RS485:1 bit de départ + 8 bits de données + 1 bit d'arrêt (no parity check) (pas de contrôle de parité)
1. L'interface
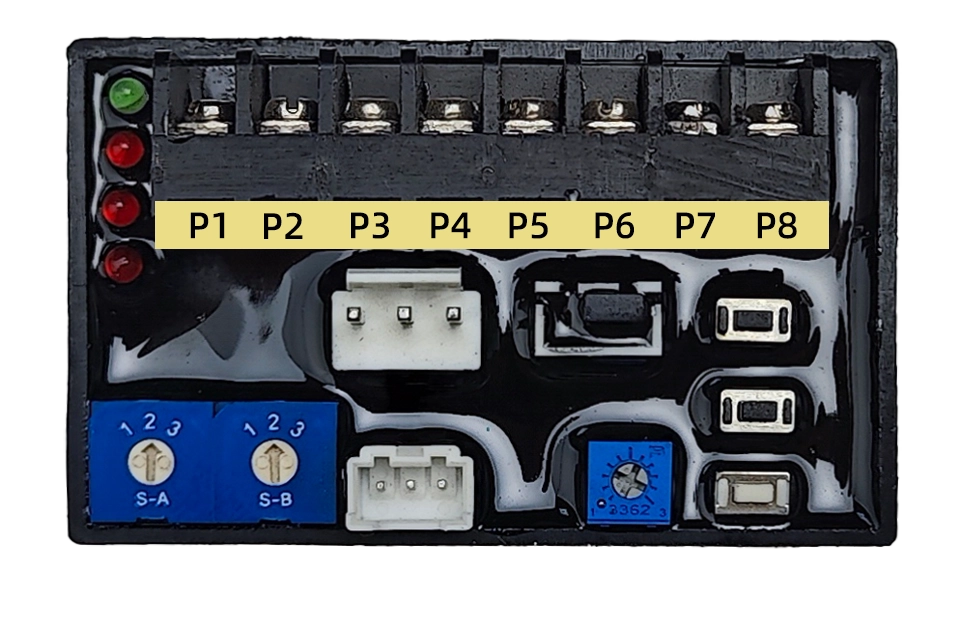

P1:Alimentation électrique -
P2:Alimentation +
P7:RS485 A
P8:RS485 B
P3~P6:Réservé(4~20mA/0~10V)
2. Schéma de connexion
Couche application
1、ADU

2. Codes de fonction
| ID | nom | décrire |
|---|---|---|
| 0x03 | Lecture de plusieurs registres | Dans un dispositif à distance, utilisez ce code de fonction pour lire le contenu de blocs consécutifs dans le registre de maintien. |
| 0x06 | Écriture d'un seul registre | Dans un appareil distant, utilisez ce code de fonction pour écrire un seul registre |
| 0x10 | Écriture de plusieurs registres | Dans un dispositif à distance, ce code de fonction permet d'écrire des blocs de registres consécutifs (de 1 à environ 120 registres). |
3. Définir les paramètres de communication
- Les registres de 0x0040 à 0x0042 sont utilisés pour définir les paramètres de communication.
- Entrez d'abord dans le mode de réglage en écrivant la valeur 0xA501 dans le registre 0x0040, puis réglez l'ID de l'esclave et la vitesse de transmission en écrivant des valeurs dans les registres 0x0041 et 0x0042.
- Les nouveaux paramètres seront mis à jour dans 1S.
- Quitter le mode de réglage en écrivant 0x0000 dans le registre 0x0040.
4. Réinitialisation des paramètres de communication à leur valeur par défaut
- Régler SA et SB sur 2.
- Maintenir le KS pendant plus de 3 secondes, le voyant rouge clignote, puis relâcher le KS.
- Maintenez ensuite le KC pendant plus de 3 secondes, le voyant rouge clignote à nouveau, puis relâchez le KC.
- Les paramètres de communication sont alors réinitialisés à leur valeur par défaut (ID esclave à 1, débit en bauds à 9600).
Cette fonction est utilisée lorsque les paramètres de communication ne sont pas respectés.
5、Registrement de la liste
| Adresse du registre | Bit du registre | Groupe de signaux | Nom du signal | valeur minimale | Valeur maximale | Entreprise | Lecture/écriture | type | Table de vérité | décrire |
|---|---|---|---|---|---|---|---|---|---|---|
| 0x0010 | b15-b5 | \ | \ | \ | \ | \ | r/w | hexagone | Garder 0 | retenir |
| b5 | \ | \ | \ | \ | \ | r/w | hexagone | Garder 0 | retenir | |
| b4 | contrôle | arrêter | \ | \ | \ | r/w | hexagone | 1 : Arrêt, 0 : Normal | Arrêter de courir | |
| b3 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir | |
| b2 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir | |
| b1-b0 | contrôle | mode | \ | \ | \ | r/w | hexagone | 1 : Contrôle de la communication | Modèle de contrôle | |
| 0x0011 | b15-b0 | contrôle | SetOpenDegree | 0 | 10000 | % | r/w | int/hex | 0-10000 correspond à 0-100% ouverture | Contrôler l'ouverture de la vanne (coefficient de rapport 1/100) |
| 0x0012 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0013 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0014 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0015 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0016 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0017 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0018 | b15-b6 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| b5 | infor | errPosition | \ | \ | \ | r | hexagone | 1 : Mauvais fonctionnement du signal de position | Signal de position signe d'erreur | |
| b4 | infor | errSignal | \ | \ | \ | r | hexagone | 1 : Dysfonctionnement du signal d'entrée | Entrée Drapeau de défaut du signal | |
| b3 | infor | overTorqueFlag | \ | \ | \ | r | hexagone | 1 : Surcharge | Drapeau de surcharge | |
| b2 | infor | drapeau coincé | \ | \ | \ | r | hexagone | 1 : Rotation bloquée | Panneau de blocage | |
| b1 | infor | openRunFlag | \ | \ | \ | r | hexagone | 1 : Fermeture de la vanne | Signe d'ouverture de la vanne | |
| b0 | infor | closeRunFlag | \ | \ | \ | r | hexagone | 1 : Ouverture de la vanne | Signe de fermeture de la vanne | |
| 0x0019 | b15-b0 | infor | diplôme ouvert | 0 | 10000 | % | r | int/hex | 0-10000 correspond à 0-100% ouverture | Ouverture actuelle de la vanne (coefficient de rapport 1/100) |
| 0x001A | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x001B | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x001C | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x001D | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x001E | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x001F | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0040 | b15-b0 | config | cfgMode | 1 | 127 | \ | rw | hexagone | 0x0000 : Entrée en mode normal | Sélection du mode, les paramètres de configuration ne peuvent être modifiés qu'en mode configuration |
| 0x0041 | b15-b0 | config | cmm_addr | 1 | 127 | \ | rw | hexagone | 1~127 | Définir l'adresse de communication |
| 0x0042 | b15-b0 | config | cmm_baudrate | \ | \ | \ | rw | hexagone | 0 : Vitesse de transmission 4800 | régler le débit en bauds |
| 0x0043 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0044 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0045 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0046 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0047 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
| 0x0048 | b15-b0 | \ | \ | \ | \ | \ | r | hexagone | Garder 0 | retenir |
Données de communication de démonstration
1. Définir la position
Entrer dans le mode de contrôle Modbus:
Tx→◇01 10 00 10 00 01 02 00 01 65 00
Rx←◆01 10 00 10 00 01 00 0C
Set Position : 0%
Tx→◇01 10 00 11 00 01 02 00 00 A5 11
Rx←◆01 10 00 11 00 01 51 CC
Définir la position : 50% (5000 -> 0x1388)
Tx→◇01 10 00 11 00 01 02 13 88 A8 47
Rx←◆01 10 00 11 00 01 51 CC
Position définie : 100% (10000 -> 0x2710)
Tx→◇01 10 00 11 00 01 02 27 10 BF 2D
Rx←◆01 10 00 11 00 01 51 CC
Arrêter
Tx→◇01 10 00 10 00 01 02 00 11 64 CC
Rx←◆01 10 00 10 00 01 00 0C
2. Obtenir la position
Tx→◇01 03 00 18 00 02 44 0C
Rx←◆01 03 04 00 30 00 00 FA 3C
3. Définir l'ID de l'esclave Modbus
Entrer dans le mode de réglage
Tx→◇01 10 00 40 00 01 02 A5 01 12 00
Rx←◆01 10 00 40 00 01 00 1D
Régler l'ID de l'esclave sur 2
Tx→◇01 10 00 41 00 01 02 00 02 28 80
Rx←◆01 10 00 41 00 01 51 DD
Quitter le mode de réglage
Tx→◇02 10 00 40 00 01 02 A5 00 C7 30
Rx←◆02 10 00 40 00 01 00 2E
4. Régler le débit en bauds du Modbus
Entrer dans le mode de réglage
Tx→◇01 10 00 40 00 01 02 A5 01 12 00
Rx←◆01 10 00 40 00 01 00 1D
Régler le débit en bauds à 9600
Tx→◇01 10 00 42 00 01 02 00 01 68 B2
Rx←◆01 10 00 42 00 01 A1 DD
Quitter le mode de réglage
Tx→◇01 10 00 40 00 01 02 A5 00 D3 C0
Rx←◆01 10 00 40 00 01 00 1D












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号