












7. Test Methods
7.1 Test Conditions
7.1.1 Environmental Conditions
7.1.1.1 Reference Atmospheric Conditions
The reference performance of the actuator should be tested under the following atmospheric conditions:
Ambient temperature: 20°C ± 2°C;
Relative humidity: 60% to 70%;
Atmospheric pressure: 86 kPa to 106 kPa.
7.1.1.2 General Atmospheric Conditions
When tests are not conducted under reference atmospheric conditions, it is recommended to perform tests under the following atmospheric conditions:
Ambient temperature: 15°C to 35°C;
Relative humidity: 45% to 75%;
Atmospheric pressure: 86 kPa to 106 kPa.
7.1.1.3 Other Environmental Conditions
Except for the Earth’s magnetic field, other external magnetic fields and mechanical vibrations should be negligible.
7.1.2 Power Conditions
7.1.2.1 Nominal Values
As specified in 4.2.2.
7.1.2.2 Tolerances
The tolerances for the test conditions are as follows:
Rated voltage: ±1%;
Rated frequency: ±1%;
Harmonic content: less than 5%.
7.2 General Test Regulations
7.2.1 The tested product should be in its normal installation position. The power supply can be connected and preheated for 1 hour to allow the internal temperature of the tested product to stabilize.
7.2.2 The zero position of the tested product can be adjusted before the test. Unless otherwise specified, no adjustment should be made during the test.
7.2.3 Unless otherwise specified, the tested product and related testing equipment should be stabilized under reference working conditions before measurements are taken, and all work conditions that may affect the measurement results should be observed and recorded.
7.2.4 The accuracy of standard instruments used in the tests should be stated in the test report, and the basic error limit should be less than or equal to one-third of the basic error limit of the tested product. The range of the instrument should match the range of the measured values.
7.2.5 During the test, the current input signal should be increased or decreased slowly, approaching the test points in the same direction, ensuring no overshoot. The increasing signal should be considered as the positive stroke, and the decreasing signal as the reverse stroke.
7.2.6 Unless otherwise specified, the output shaft (rod) of the actuator should be loaded with the rated load during the test. The load is considered positive when its action direction coincides with the direction of motion of the output shaft (rod); otherwise, it is considered negative.
7.2.7 Unless otherwise specified, test measurement points should be at 0%, 25%, 50%, 75%, and 100% of the input range. Each test point should be measured three times in both the increasing and decreasing signal directions. Factory inspection allows for measuring each test point once.
7.2.8 Unless otherwise specified, the influencing factors for the test should only change within the specified working conditions. All other working conditions should remain constant under reference conditions.
7.2.9 If it is not possible to conduct influence factor tests under reference atmospheric conditions due to conditions, the test can be performed under general atmospheric conditions.
7.2.10 Unless otherwise specified, the rated stroke range for the test is as follows:
Multi-turn: 10 turns;
Angle stroke: 90°;
Linear stroke: 16 mm.
7.3 Basic Error
The basic error is calculated by slowly increasing or decreasing the input signal, recording the input signal values and the stroke values of the output shaft (rod) in both positive and reverse stroke directions, according to Formula (1).

Formula (1)
Where:
δ: Basic error, %;
L1: Stroke value of the output shaft (rod), in degrees (°), millimeters (mm), or turns (r);
Lo: Theoretical stroke value of the output shaft (rod), in degrees (°), millimeters (mm), or turns (r);
L: Rated stroke range of the output shaft (rod), in degrees (°), millimeters (mm), or turns (r).
Check if the basic error at each measurement point exceeds the limit specified in 6.1.1.
7.4 Position Output Signal Basic Deviation
The position output signal is connected to a 250Ω load impedance, and the actuator is run to the “fully closed” position. Adjust the position output signal to 4 mA; run the actuator to the “fully open” position, and adjust the position output signal to 20 mA. Then, run the actuator and record the position output signal values at each point in both the positive and reverse stroke directions. Basic deviation is calculated according to Formula (2).

Formula (2)
Where:
△0: Position output signal basic deviation, %;
Io: Theoretical value of the position output signal, in milliamps (mA);
I1: Measured value of the position output signal, in milliamps (mA);
I: Range of the position output signal, in milliamps (mA). (For 4 mA to 20 mA, I = 16 mA; for 0 mA to 20 mA, I = 20 mA).
Check if the basic deviation at each measurement point exceeds the limit specified in 6.1.2.
7.5 Hysteresis
The hysteresis of the actuator is determined by the maximum algebraic difference between the basic errors of the forward and reverse strokes measured at each test point, as determined in 7.3 and 7.4.
7.6 Dead Zone
For regulating actuators, the dead zone should be measured at 25%, 50%, and 75% of the rated stroke. The measurement steps are as follows:
Slowly increase (or decrease) the input signal until a perceptible stroke change occurs at the output shaft (rod) and record the input signal value at this point I (mA);
Then slowly decrease (or increase) the input signal in the opposite direction until a perceptible stroke change occurs at the output shaft (rod) and record the input signal value I² (mA).
The dead zone is calculated according to Formula (3).

Formula (3)
Where:
△: Dead zone, %.
7.7 Time Delay
Apply a step signal of 15% of the input range to the input signal terminal of the regulating actuator, use an oscilloscope to record the input signal curve and position output signal curve, and observe the time difference from the initial input signal to the start of the output signal change to see if it exceeds the limit specified in 6.1.5.
7.8 Rated Stroke Time Error
Apply 45% to 55% of the rated load on the actuator, apply a step signal sufficient to move the actuator’s output shaft (rod) through the rated stroke, and record the time for the output shaft (rod) to move the rated stroke. The rated stroke time error is calculated according to Formula (4).

Formula (4)
Where:
δt: Rated stroke time error, %;
t1: Measured time for the output shaft (rod) to move the rated stroke, in seconds (s);
t: Theoretical rated stroke time, in seconds (s).
7.9 Start Characteristics
Apply a reverse rated load on the output shaft (rod) of the actuator, and change the power supply voltage to the lower limit value. Then apply the input signal and observe whether the actuator can start normally.
7.10 Stroke Control Mechanism Repeatability Error
For actuators with a stroke control mechanism, apply 25% to 30% of the rated load to the output shaft (rod) and operate the actuator alternately in the forward and reverse strokes five times. Observe and record the stroke values of the output shaft (rod) when the stroke control mechanism switches. Calculate the error of each recorded value compared to the base value and determine whether the error exceeds the limit specified in 6.1.8.
7.11 Insulation Resistance
Under general atmospheric conditions and with the actuator unloaded, disconnect the power supply to the tested product and keep the power switch in the “on” position. Short-circuit the input and power terminals, then use a 500V DC insulation resistance tester to measure the insulation resistance between the terminals as specified in 6.1.9.
7.12 Insulation Strength
Under general atmospheric conditions and with the actuator unloaded, disconnect the power supply and keep the power switch in the “on” position. Short-circuit the input and power terminals, then according to the voltage and frequency specified in 6.1.10, slowly raise the test voltage from zero to the specified value and hold for 1 minute. Observe if there is any breakdown or arcing, then slowly lower the test voltage to zero and disconnect the test power.
7.13 Temperature Rise
Before the test, measure the cold resistance of the motor and power transformer windings using a bridge, then continuously run for 12 hours as per 7.14 and immediately measure the hot resistance of the motor and power transformer windings. Calculate the temperature rise according to Formula (5).

Formula (5)
Where:
Q: Temperature rise, in Celsius (°C);
R₂: Hot resistance of the winding, in ohms (Ω);
R₁: Cold resistance of the winding, in ohms (Ω);
T1: Room temperature during cold resistance measurement, in Celsius (°C);
T₂: Room temperature during hot resistance
7.14 Long-Term Operation Stability
Operate the actuator within its rated stroke and apply 30% of the rated load, with a duty cycle of 20% to 80%. Perform 48 hours of operation as required in 4.2.6, with the number of cycles per hour. After the test, verify if the actuator meets the requirements of 6.1.12.
7.15 Maximum and Minimum Control Torque and Thrust Reproducibility Error
Test procedure as follows: a) Install the actuator on the test bench, set the torque protection value in both the open and close directions to the maximum control torque or thrust value, and gradually load the actuator until a “torque overload” or “thrust overload” alarm is triggered. Measure the output torque or thrust value. Measure three times in each direction and take the average value as the base value of output torque or thrust. b) Install the actuator on the test bench, set the torque protection value in both open and close directions to the minimum control torque or thrust value, and gradually load the actuator until a “torque overload” or “thrust overload” alarm is triggered. Measure the output torque or thrust value. Measure three times in each direction and take the average value as the base value of output torque or thrust. c) Calculate the reproducibility error of the control torque or thrust according to formula (6).

Formula 6:
In this formula:
δ0: Reproducibility error of control torque or thrust, in %
Ms: Measured output torque or thrust value, in N·m (or thrust in N)
Mz: Base value of output torque or thrust, in N·m (or thrust in N).
7.16 Manual-Electric Switch Mechanism
Test procedure as follows: a) No-load switch check. Switch the actuator from electric to manual mode, rotate the handwheel to turn the output shaft clockwise and counterclockwise for at least one full rotation; then, operate the actuator electrically to turn the output shaft in both directions for at least one full rotation. Repeat twice and confirm if it meets the requirements of 6.1.14. b) Loaded switch check. Install the actuator on the test bench, adjust the protection torque in both open and close directions to the maximum control torque, and gradually load the actuator until the torque switch activates. After stopping, without unloading, repeat the test in part a) to confirm if it meets the requirements of 6.1.14.
7.17 Intelligent Features
7.17.1 Display Function
Check whether the working parameters, operation status information, fault alarms, and other display information are normal, and whether the display content is complete and clear through the human-machine interface.
7.17.2 Parameter Setting Function
Without opening the electrical cover, check whether the human-machine interface allows for setting parameters such as stroke, torque, current input signal calibration, and output signal adjustment.
7.17.3 On-Site Configuration Function
Without opening the electrical cover, use the human-machine interface to set the actuator’s 4-way switch contact outputs as follows: open-position closed, open-position open, closed-position closed, closed-position open. Start the actuator to the open and closed positions, checking whether the switch contact outputs meet the set requirements.
If applicable, check the behavior after power failure and adjust parameters such as torque protection.
7.17.4 Fault Self-Diagnosis and Alarm Function
In no-load conditions, apply power to the actuator and disconnect the motor temperature lead from the actuator’s control system to check if the motor overheat alarm is triggered.
7.17.5 Power Sequence Self-Adaptive Function
For actuators using three-phase power, change the phase sequence of the power supply and confirm whether the switching direction is correct in both local and remote control modes.
7.17.6 Continuous Output Torque (Thrust) Measurement Function
Place the actuator on the test bench, and during operation, change the applied torque (thrust) continuously to observe if the displayed torque (thrust) values change accordingly on the human-machine interface.
7.18 Noise
In a room with the windows and doors closed and background noise not exceeding 45 dB, perform a no-load startup of the actuator and measure the noise at a distance of 1 meter from the actuator surface. Confirm that the noise meets the requirements in 6.1.16.
7.19 Stepless (Frequency Conversion) Speed Regulation
Set the actuator to reduce speed when it reaches the target position, and test whether the speed changes within the specified range at different load conditions to confirm its compliance.
7.20 Environmental Temperature Impact
Under no-load conditions, the actuator should be placed into a temperature test chamber. The test temperatures and test sequence are as follows:
For actuators with a working ambient temperature of -10°C to 55°C:
20°C (reference), 40°C, 55°C, 20°C, 0°C, -10°C, 20°C;
For actuators with a working ambient temperature of -20°C to 60°C:
20°C (reference), 40°C, 60°C, 20°C, 0°C, -20°C, 20°C;
For actuators with a working ambient temperature of -30°C to 70°C:
20°C (reference), 45°C, 70°C, 20°C, 0°C, -30°C, 20°C.
If agreed upon by all parties, tests may be conducted at just four temperature points: 20°C (reference), the maximum temperature, the minimum temperature, and 20°C. The permissible tolerance at each temperature point is ±2°C. At each temperature point, the temperature should be maintained for 2 hours to allow the product’s internal components to reach thermal stability. At the full stroke’s 0% and 100% positions, the low-end and high-end values of the proportional control and position signal output should be measured. The average of three measurements at each temperature point should be taken. The changes in the low-end and high-end values at each temperature point, when the temperature changes by 10°C, should be calculated using formulas (7) and (8), and it should be confirmed that the results meet the requirements of section 6.2.1.


Where:
△T0: The change in the low and high-end values of the position output signal when the temperature changes by 10°C, in %;
XTi: The measured low and high-end values of the position output signal at the adjacent temperature, in milliamps (mA);
XT0: The measured low and high-end values of the position output signal at the starting temperature, in milliamps (mA);
Ti: The adjacent temperature, in degrees Celsius (°C);
T0: The starting temperature, in degrees Celsius (°C);
△T1: The change in the low and high-end values of the output shaft (rod) when the temperature changes by 10°C, in %;
LTi: The measured low and high-end stroke values of the output shaft (rod) at the adjacent temperature, in degrees (°), millimeters (mm), or rotations (r);
LT0: The measured low and high-end stroke values of the output shaft (rod) at the starting temperature, in degrees (°), millimeters (mm), or rotations (r).
7.21 Humidity Impact
Place the actuator in a temperature and humidity chamber, raise the temperature to 40°C ± 2°C, and adjust the humidity to 91%–95%, maintaining it for 48 hours. After the test, check the actuator’s insulation resistance as specified.
7.22 Power Supply Voltage Influence
Under no-load conditions, the power supply voltage of the actuator is adjusted from the nominal value to both the upper and lower limit values. At the 0% and 100% positions of the full stroke, the low-end and high-end values of the proportional control and position signal outputs are measured. The average of three measurements at each point is taken, and the changes in the lower limit and range are calculated using formulas (9) and (10). The results should be verified to meet the requirements of section 6.2.3.
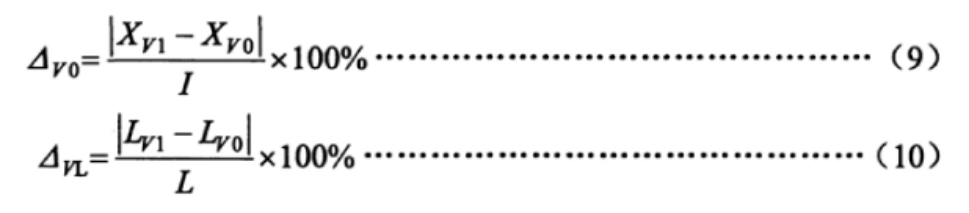
Where:
△V0: The change in the low and high-end values of the position output signal when the power supply voltage changes, in %;
XV1: The measured low and high-end values of the position output signal at the upper and lower limit voltages, in milliamps (mA);
XV0: The measured low and high-end values of the position output signal at the nominal voltage, in milliamps (mA);
△VL: The change in the low and high-end values of the output shaft (rod) when the power supply voltage changes, in %;
LV1: The measured low and high-end stroke values of the output shaft (rod) at the upper and lower limit voltages, in degrees (°), millimeters (mm), or rotations (r);
LV0: The measured low and high-end stroke values of the output shaft (rod) at the nominal voltage, in degrees (°), millimeters (mm), or rotations (r).
7.23 Mechanical Vibration Influence
Under no-load conditions, the actuator is installed on a vibration test stand. The actuator is run to both the 0% and 100% positions of the full stroke. Sweep frequency vibration is applied at a frequency of 10Hz to 150Hz in three mutually perpendicular directions to identify the resonance point. If a resonance point is found, vibration tests are conducted at the resonance frequency for 30 minutes. If no resonance point is found, a 30-minute vibration test is conducted at a frequency of 150Hz.
During the test, the low-end and high-end values of the actuator’s output are measured. The changes in the low-end and high-end values are calculated using formulas (11) and (12). The results should be verified to meet the requirements of section 6.2.4.
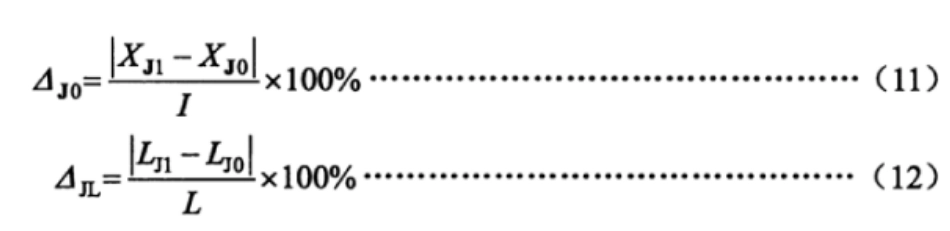
Where:
△J0: The change in the low and high-end values of the position output signal due to mechanical vibration, in %;
XJ1: The measured low and high-end values of the position output signal during the vibration test, in milliamps (mA);
XJ0: The measured low and high-end values of the position output signal before the vibration test, in milliamps (mA);
△JL: The change in the low and high-end values of the output shaft (rod) due to mechanical vibration, in %;
LJ1: The measured low and high-end stroke values of the output shaft (rod) during the vibration test, in degrees (°), millimeters (mm), or rotations (r);
LJ0: The measured low and high-end stroke values of the output shaft (rod) before the vibration test, in degrees (°), millimeters (mm), or rotations (r).
7.24 Transportation Environmental Impact
Temperature, shock, and free-fall tests shall be performed according to the test parameters specified in section 6.2.5 of this standard and the methods in GB/T 25480. After the tests, the zero position can be adjusted, followed by performance testing and visual inspection.
Note: If the environmental temperature influence test has already been performed at 55°C (or higher), the high-temperature test can be waived.
7.25 Radio Frequency Electromagnetic Field Radiation Immunity
Under no-load conditions, the actuator is moved to the 50% position of the full stroke. A radiated electromagnetic field in the frequency range of 80 MHz to 1000 MHz with an intensity of 3V/m is applied at a distance of 3 meters from the actuator, in accordance with the requirements of GB/T 17626.3. During this test, the changes in position feedback output signal or output shaft (rod) stroke values are observed and recorded to confirm that the values meet the requirements of section 6.2.6 of this standard.
7.26 Electrical Fast Transient/Burst Immunity
Under no-load conditions, the actuator is moved to the 50% position of the full stroke. The test voltage is applied according to the requirements of GB/T 17626.4, with a positive and negative 1000V on the power supply terminal and a positive and negative 500V on the signal input terminal. During this test, the changes in position feedback output signal or output shaft (rod) stroke values are observed and recorded to confirm that the values meet the requirements of section 6.2.7 of this standard.
7.27 Surge (Impulse) Immunity
Under no-load conditions, the actuator is moved to the 50% position of the full stroke. A positive and negative 1kV voltage is applied between the actuator’s power supply line and ground, as per GB/T 17626.5. During this test, the changes in position feedback output signal or output shaft (rod) stroke values are observed and recorded to confirm that the values meet the requirements of section 6.2.8 of this standard.
7.28 Electrostatic Discharge Immunity
Under no-load conditions, the actuator is moved to the 50% position of the full stroke. The actuator’s shell is securely grounded. Positive and negative 4kV contact discharge and then positive and negative 8kV air discharge are applied to the actuator, following the requirements of GB/T 17626.2. During this test, the changes in position feedback output signal or output shaft (rod) stroke values are observed and recorded to confirm that the values meet the requirements of section 6.2.9 of this standard.
7.29 Power Frequency Magnetic Field Immunity
Under no-load conditions, the actuator is placed on the external magnetic field test stand and moved to the 50% position of the full stroke. The magnetic field strength is 400 A/m, and the test directions are X/Y/Z, in accordance with GB/T 17626.8. During this test, the changes in position feedback output signal or output shaft (rod) stroke values are observed and recorded to confirm that the values meet the requirements of section 6.2.10 of this standard.
7.30 Appearance
Visual and tactile methods should be used to check whether the surface is flat and smooth, without cracks, burrs, or other defects that affect the appearance. The surface coating should be securely attached, flat, smooth, and uniform in color, with no oil stains, indentations, or other mechanical damage. For actuators with display functions, the display should be clearly visible without missing characters.
7.31 Enclosure Protection Level
The IP67 or IP65 enclosure protection test should be carried out according to the method specified in GB 4208—2008.
7.32 Explosion-Proof Performance
Explosion-proof tests should be conducted by a nationally recognized testing unit, according to the requirements of GB 3836.1 and GB 3836.2.












 鄂公网安备 42018502006527号
鄂公网安备 42018502006527号